|
»Click here to display Table of Contents«
|

ConstraintMate Joint |

|

|

|

|
|
ConstraintMate Joint |
|
|
|

|
|
»Click here to display Table of Contents«
|
ConstraintMate Joint |
|
|
|
|
|
ConstraintMate Joint |
|
|
|
|
Location: Advanced Joints panel - Connectivity tab
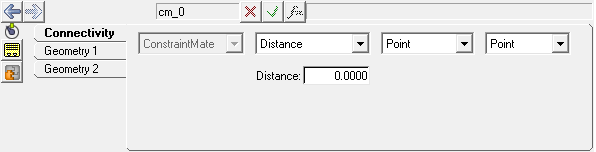
Advanced Joints panel - Connectivity tab for a ConstraintMate Joint
The ConstraintMate joint - Connectivity tab defines the general mating type of constraints between two bodies. There is a variety of types of constraints which are available under this category, however these can be broadly categorized under the following three types:
| • | Distance |
| • | Coincident |
| • | Tangent |
Each constraint type further provides various geometric methods to constrain one body with respect to the other body. For example, a general mating constraint type of Distance can be defined between two bodies (Body 1 & Body 2) in order to ensure that a constant distance is maintained between a point on Body 1 with regard to a line on Body 2. In this case, select Point from Geometry 1 drop-down menu and Line from the Geometry 2 drop-down menu.
Note The corresponding MotionSolve argument under the Constraint_Mate statement is DIS_POI_LIN.
The table below summarizes the various combinations of Geometry choices along with the keyword TYPE that is written to the Constraint_Mate statement for MotionSolve:
Constraint type |
Geometry 1 |
Geometry 2 |
MotionSolve keyword (TYPE) |
|---|---|---|---|
Distance |
Point |
Point |
DIS_POI_POI |
Sphere |
DIS_POI_SPH |
||
Line |
DIS_POI_LIN |
||
Cylinder |
DIS_POI_CYL |
||
Sphere |
Sphere |
DIS_SPH_SPH |
|
Line |
DIS_SPH_LIN |
||
Cylinder |
DIS_SPH_CYL |
||
Cone |
DIS_SPH_CON |
||
Plane |
DIS_SPH_PLA |
||
Line |
Line |
DIS_LIN_LIN |
|
Cylinder |
DIS_LIN_CYL |
||
Plane |
DIS_LIN_PLA |
||
Cylinder |
Cylinder |
DIS_CYL_CYL |
|
Plane |
Cone |
DIS_PLA_CON |
|
Cylinder |
DIS_PLA_CYL |
||
Coincident |
Point |
Cylinder |
COI_POI_CYL |
Sphere |
COI_POI_SPH |
||
Point |
COI_POI_POI |
||
Line |
COI_POI_LIN |
||
Cone |
COI_POI_CON |
||
Line |
Cylinder |
COI_LIN_CYL |
|
Plane |
COI_LIN_PLA |
||
Line |
COI_LIN_LIN |
||
Tangent |
Sphere |
Line |
TAN_SPH_LIN |
Cylinder |
TAN_SPH_CYL |
||
Plane |
TAN_SPH_PLA |
||
Cone |
TAN_SPH_CON |
||
Sphere |
TAN_SPH_SPH |
||
Line |
Cylinder |
TAN_LIN_CYL |
|
Cylinder |
Cylinder |
TAN_CYL_CYL |
|
Plane |
Cylinder |
TAN_PLA_CYL |
|
Cone |
TAN_PLA_CON |
See Also:
ConstraintMate – Geometry Tabs
Constraint_MATE - MotionSolve XML Format Model Statement
*ConstraintMate() - MDL Statement