The Advanced tab on the Contacts panel provides advanced options to control the contact event during simulation in MotionSolve.
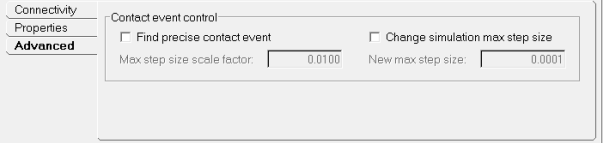
Contacts panel - Advanced tab
| Note | This tab is only available in the MotionSolve mode. |
The following Contact event control options are available:
Find precise
contact event
|
Activate this option to tell the solver to capture the first event of contact precisely.
|
|
Max step size scale factor
|
Scale factor applied to maximum step size when contact is detected. See Comments below.
|
Change simulation
max step size
|
Activate this option to change the maximum step size for the simulation after contact is detected.
|
|
New max step size
|
The new maximum step size after contact is detected.
|
Comments
| • | Activating the Find precise contact event option will automatically introduce a sensor entity in the MotionSolve solver deck which will track the contact force function. |
| • | As the sensor is triggered by a positive contact force, the solver rejects the last successful step and proceeds from the previous step size with a changed maximum step size. The changed maximum step size is calculated as (current max step size) * (Max step size scale factor). |
| • | Activating the Change simulation max step size option will enable changing the maximum step size for the future course of the of the simulation. |
| • | Both of the above options provide increased accuracy and robustness in contact simulations, however they will result in increased simulation times. It is therefore recommended that these options be used selectively and only when necessary. |
See Also:
Sensor_Event (MotionSolve XML Command)





