Impact
|
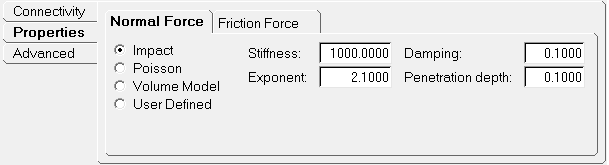
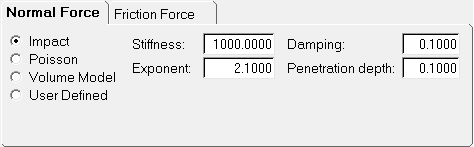
Use the Impact method for normal force calculation.
Impact contact properties:

|
|
Stiffness (k)
|
The stiffness of the boundary surface interaction.
Stiffness > 0
|
|
Exponent (e)
|
The exponent on penetration depth in the force-penetration depth characteristic of the contact interface. For a stiffening spring characteristic, it must be greater than 1.0. For a softening spring characteristic, it must be less than 1.0.
Exponent > 1.
|
|
Damping (cmax)
|
The maximum damping coefficient. This value should be greater than 0.0.
|
|
Penetration depth (d)
|
The depth beyond which full damping is applied.
|
Poisson
|
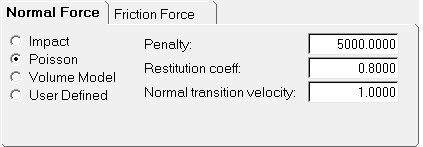
Use the Poisson method for normal force calculation.
Poisson contact properties:
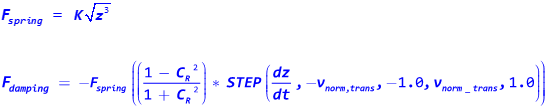
where,
| • | K Penalty parameter (stiffness). |
| • | z Contact penetration depth. |
| • | CR The coefficient of restitution. This is equal to 0 for a perfectly plastic collision and 1 for a perfectly elastic collision. |
| • | vnorm, trans Normal velocity at which full damping is applied. |
|
|
Penalty
|
Determines the local stiffness properties between materials. Larger values lead to reduced penetration between two bodies.
|
|
Restitution coefficient
|
Represents the energy loss between the two bodies in contact. The valid range for this value is between 0.0 and 1.0. A value of 1.0 represents no energy loss and a perfectly elastic contact. A value of 0.0 represents a perfectly plastic contact and all energy is dissipated during contact.
|
|
Normal transition velocity
|
Velocity limit after which full damping force is applied.
|
|
Use augmented
Lagrangian formulation
|
Applicable for the ADAMS SolverMode only. Used to refine the accuracy of the normal force between the two bodies.
|
Volume Model
|
This based on an Elastic foundation model. The rigid bodies in contact are assumed to be covered by thin elastic layers. If the tangential shear stress in the layer is ignored, a direct relationship can be found between the normal pressure and normal displacement. This relationship can be used to generate the force between two contacting layers. This model is well-known in the literature regarding contacts.

Volume Model properties:
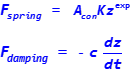
where,
| • | z Contact penetration depth |
| • | exp Exponent for the force deformation characteristic |
The VOLUME model assumes that both the colliding bodies are surrounded by a layer of springs whose stiffness is determined by the material’s elastic modulus properties and the depth of this layer. The individual stiffness for each body (I and J) is calculated as:

where,
| • | ci, cj Stiffness parameter for I and J bodies, respectively |
| • | Mi, Mj Elastic Modulus for I and J bodies, respectively |
| • | di, dj Layer depth for I and J bodies, respectively |
The equivalent contact stiffness is calculated assuming that the springs for body I and J are in series:

|
|
Bulk Modulus
|
The bulk modulus of a substance measures the resistance of a substance to uniform compression. It is defined as the ratio of the infinitesimal pressure increase to the resulting relative decrease of the volume.
|
|
Shear Modulus
|
The shear modulus or modulus of rigidity, denoted by G, is defined as the ratio of shear stress to the shear strain.
|
|
Layer Depth
|
The layer depth of material.
|
|
Exponent
|
The exponent of the force deformation characteristic.
|
|
Damping
|
The damping coefficient value.
|
User Defined
|
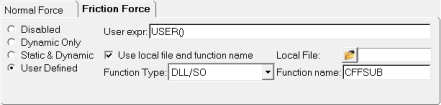
Uses a user defined subroutine to calculate the contact normal force.
Refer to Subroutine Interface to MotionSolve to learn more about how user subroutines can be used with MotionSolve.
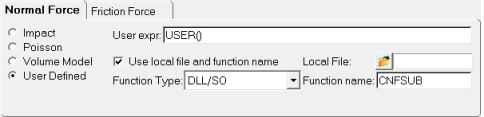
The following User Defined contact properties are available:
|
|
User expr
|
An expression containing the USER function with parameters that call the subroutine during solution.
|
|
Use local file and
function name
|
Activate the check box to specify a local file containing a subroutine. See Function Type below for supported types of subroutines. If this option is not specified, MotionSolve will search for a subroutine following its User Subroutine Loading Rules.
|
|
Function Type
|
The type of subroutine. A DLL (SO in Linux), Python, and Matlab are all types of subroutines which are supported by MotionSolve.
|
|
Local File
|
Provide a file name containing the subroutine based on the Function Type selected.
|
|
Function name
|
The name of the function within the subroutine to be called by the solver. If no function name is provided, MotionSolve will search for the default function CNFSUB.
|