|
»Click here to display Table of Contents«
|

Contacts Panel |

|

|

|

|
|
Contacts Panel |
|
|
|

|
|
»Click here to display Table of Contents«
|
Contacts Panel |
|
|
|
|
|
Contacts Panel |
|
|
|
|
The Contacts panel allows you to specify the attributes of a contact force between two bodies. Each body is represented by a set of graphics entities. The graphics entities could be a point, a set of curves, or the outer surfaces of the bodies depending on the type of contact that is chosen.
To add a Contact, right-click the ![]() icon on the toolbar.
icon on the toolbar.
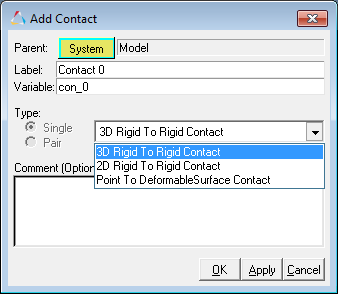
From the Add Contact dialog, select a Contact type from the drop-down menu (3D RigidToRigidContact, 2D RigidToRigidContact, or PointToDeformableSurfaceContact), and click OK.
The corresponding Contacts panel is displayed.

Contacts panel - 3D Rigid to Rigid Contact

Contacts panel - 2D Rigid to Rigid Contact
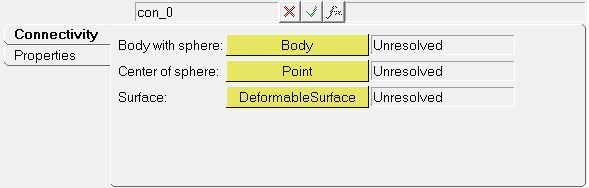
Contacts panel - Point to Deformable Surface Contact
The Contacts panel contains the following contact types:
Use this type of contact to capture contact forces between rigid bodies moving relative to each other in a 3D frame. |
|
Use this type of contact to capture contact forces between rigid bodies moving relative to each other in a 2D plane. |
|
Use this type of contact to capture contact forces between a deformable surface and a sphere of radius (r), where the sphere belongs to a second body. Flexbody to flexbody or flexbody to rigid body contact can be modeled by creating many of these entities where the set of spheres represent a discretization of the second body’s outer surface. |
See Also:
Best Practices for Running 3D Contact Models in MotionSolve
Create Curve from Points/Nodes Macro
Geometry Cleanup for Contact Modeling
Force_Contact (MotionSolve XML Command)
Force_PTdSF (MotionSolve XML Command)