From the Point to Deformable Surface Contact -Properties tab on the Contacts panel, you can define the contact method and the properties for the option type selected.
Select:
|
To:
|
LINEAR
|
Select this type of contact algorithm to model the contact force using stiffness and damping values.
|
POISSON
|
Select this type of contact algorithm to model the contact force using the penalty method.
|
User Defined
|
Select this type of contact algorithm to model the contact force using the user defined method.
|
Flip normal
|
For a 3-D object, the normals point outward which represents a typical outer surface of a volume. Flip normal can be used to turn that surface into a void, or "hole".
|
LINEAR
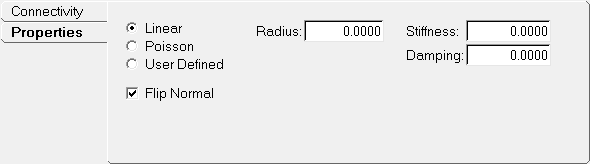
Contacts panel - Properties tab - Point to Deformable Surface Contact (with the LINEAR option selected)
Use:
|
To:
|
Radius
|
Enter the radius of the sphere that the deformable surface will be contacting.
|
Stiffness
|
Enter the stiffness of the contact force that applies to the Linear contact method.
|
Damping
|
Enter the damping of the contact force that applies to the Linear contact method.
|
POISSON
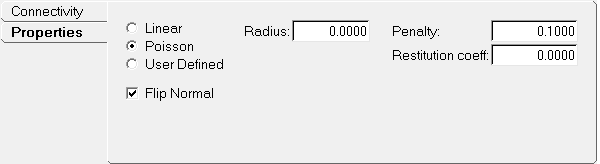
Contacts panel - Properties tab - Point to Deformable Surface Contact (with the POISSON option selected)
Use:
|
To:
|
Radius
|
Enter the radius of the sphere that the deformable surface will be contacting.
|
Penalty
|
Enter the penalty value to model the contact force with the Poisson method.
|
Restitution
coefficient
|
Enter the value representing the energy loss for the Poisson method.
|
User Defined

Contacts panel - Properties tab - Point to Deformable Surface Contact (with the User Defined option selected)
Use:
|
To:
|
Radius
|
Enter the radius of the sphere that the deformable surface will be contacting.
|
User expr
|
Provide an expression with the USER solver function with parameters being passed to the user subroutine.
|
Use local file and function name
|
Activate the check box to specify a local file where the subroutine code can be accessed by the solver. The type of file to be specified will depend on the selected Function Type. For example if DLL/SO is selected, you can specify a file with a .dll extension (for Windows) or an .so extension (for Linux).
|
Function Type
|
Valid options for MotionSolve:
|
Function Name
|
Specify the function name in the sub-routine that is used to calculate the contact force. MotionView provides PTDSFSUB as the default, which is the default function used by MotionSolve.
|





