The Orient by angles method orients a coordinate system with respect to another coordinate system using Euler’s angles. The Euler angles are entered into the text boxes and the reference coordinate system is specified with the Ref Marker collector.
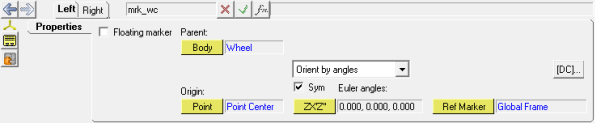
Orient by angles option
The three Euler angles are labeled Z, X’, and Z’’. They are used to perform a series of three simple rotations from the reference coordinate frame.
[DC] allows you to view the direction cosines’ matrix for a coordinate system.
| 1. | From the Project Browser, select an entity that has an origin and an orientation. |
The "entity" panel is automatically displayed.
| 2. | From the Orientation drop-down menu, select Orient by angles. |
| 3. | Click ZX'Z" under Euler angles. |
The Euler Angles dialog is displayed.
| 4. | Rotate the coordinate system Z degrees around the mutual Z axis. |
| 5. | Rotate the coordinate system X’ degrees around its new X axis. |
| 6. | Rotate the coordinate system Z’’ degrees around its new Z axis. |
|
| 1. | From the Project Browser, select an entity that has an origin and an orientation. |
The "entity" panel is automatically displayed.
| 2. | From the Orientation drop-down menu, select Orient by angles. |
| 3. | Use the Ref Marker collector to select the coordinate system to which to align the second coordinate system. |
| 4. | Click ZX'Z" under Euler angles. |
The Euler Angles dialog is displayed.
| 5. | Enter 0, 0, 0 for the Euler angles. |
The two coordinate systems are now aligned. Your coordinate system remains parallel to the reference coordinate system as changes are made to the model.
|






