|
»Click here to display Table of Contents«
|

Methods of Orientation |

|

|

|

|
|
Methods of Orientation |
|
|
|

|
|
»Click here to display Table of Contents«
|
Methods of Orientation |
|
|
|
|
|
Methods of Orientation |
|
|
|
|
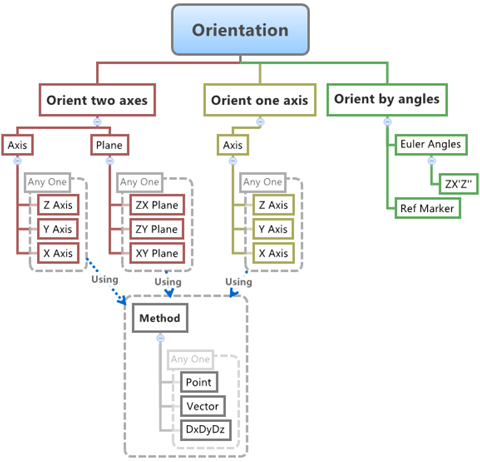
There are three methods for orienting a coordinate system in MotionView:
Orient one axis explicitly using a point or a vector and allow MotionView to calculate the other two for you. This method is used to orient axisymmetric entities. |
|
Orient two axes using a combination of points and/or vectors and allow MotionView to compute the third axis for you. |
|
Orient by specifying Euler angles with respect to any other coordinate system in the model. |
The topology map below shows how an entity can be oriented using various orientation methods:
Orientation methods are specified using a combo box. Panel options reflect the current orientation method.
Methods of orientation