In the Contour, Iso Value, Tensor Plot, Vector Plot, and Deformed panels you can select the result coordinate system to be used to process results. Subsequent options are dependent on the current averaging method. The available coordinate systems are:
The global coordinate system is the HyperView default coordinate system. It is displayed in the bottom left corner of the HyperView window.
|
The element coordinate system is defined from the geometry, that is, the nodal connectivity of the element. The HyperView element coordinate systems for the following elements are described:
For Quad elements, the reader automatically selects one of the following methods:
Method 1:
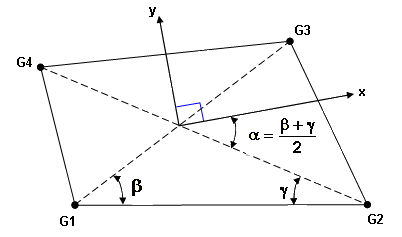
The origin of the coordinate system is located at the centroid of the element.
x is along a line that bisects the angles between G2-G4 and G1-G3.
y is perpendicular to x as shown in the figure.
Method 2:
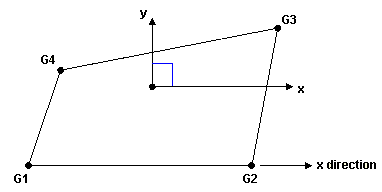
The origin of the coordinate system is located at the centroid of the element.
x is along the G1-G2 line.
y is perpendicular to x.
|
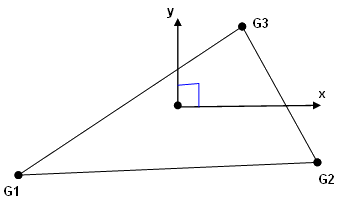
The origin of the coordinate system is located at the centroid of the element.
x is along the G1-G2 line.
y is perpendicular to x as shown in the figure.
|
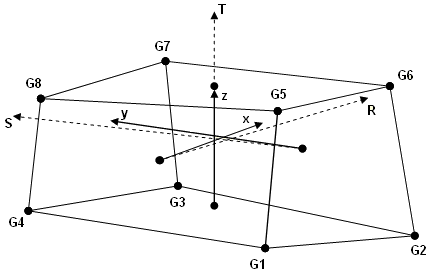
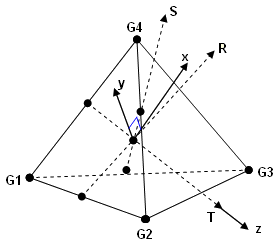
The element coordinate system for the Hexa element is defined in terms of the three vectors R, S, and T, which join the centroids of opposite faces, as follows:
R vector joins the centroids of faces G4-G1-G5-G8 and G3-G2-G6-G7.
S vector joins the centroids of faces G1-G2-G6-G5 and G4-G3-G7-G8.
T vector joins the centroids of faces G1-G2-G3-G4 and G5-G6-G7-G8.
The origin of the coordinate system is located at the centroid of the element. The axes are derived as follows:
z = T
y = T x R
x = y x z
|
The element coordinate system is derived from the three vectors, R, S, and T, which join the midpoints of opposite edges, as follows:
R vector joins midpoints of edges G1-G2 and G3-G4.
S vector joins midpoints of edges G1-G3 and G2-G4.
T vector joins midpoints of edges G1-G4 and G2-G3.
The origin of the coordinate system is located at the centroid of the element. The axes are derived as follows:
z = T
y = T x R
x = y x z
|
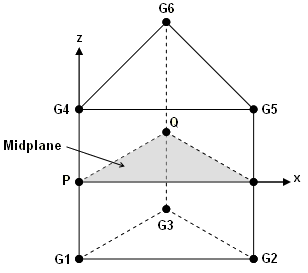
The element coordinate system for the Penta element is derived accordingly. A midplane is formed by the three midpoints of the straight lines between the top (G1-G2-G3) and bottom (G4-G5-G6) triangular faces. The origin of the coordinate system is located at the centroid of the element. The axes are formed as follows:
z =
|
A line along the bisector of the midplane normal and the line connecting the centroids of the top (G1-G2-G3) and bottom (G4-G5-G6) faces
|
y =
|
The vector connecting points P and Q where P and Q are defined as follows:
|
|
P =
|
The midpoint along the line, G1-G4.
In order to define Q, you must define a plane that passes through P and is perpendicular to axis z.
|
|
Q =
|
The intersection of the plane defined above and the line G3-G6.
|
x =
|
y x z
|
|
|
Transforms to the material system.
This option is only available when the Advanced Result Math template is selected in the Load Model panel and a solver input deck is loaded.
|
Transforms to the ply system.
This option is only available when the Advanced Result Math template is selected in the Load Model panel and a solver input deck is loaded.
|
The analysis coordinate system for an element reflects the system in which the results were defined for that element. Therefore, different elements in a model can have different systems, depending on the way they were defined in the results file. For example, a shell element can be in terms of its elemental system whereas a solid element could be in terms of the global system.
|
The user coordinate system is a system created by the user or imported from the model file. All local coordinate systems from the model file will be imported as user systems in HyperView.
|
See Also:
Nodal Averaging of Elemental Results
Simple Averaging
Advanced Averaging
Difference
Projection Rule






