|
»Click here to display Table of Contents«
|

/FRAME/MOV2 |

|

|

|

|
|
/FRAME/MOV2 |
|
|

|

|
|
»Click here to display Table of Contents«
|
/FRAME/MOV2 |
|
|
|
|
|
/FRAME/MOV2 |
|
|
|
|
Block Format Keyword
/FRAME/MOV2 - Moving Frames
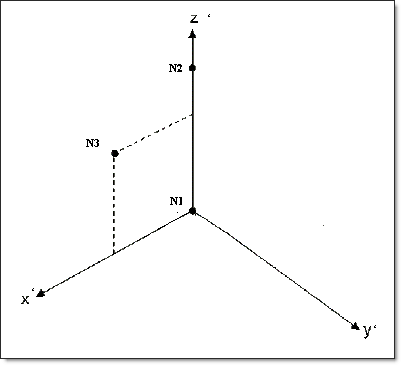
Describes moving frames. Relative motion with respect to a reference frame. Moving frame definition differs from /FRAME/MOV (Comment 8).
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
/FRAME/MOV2/frame_ID |
|||||||||
frame_title |
|||||||||
node_ID1 |
node_ID2 |
node_ID3 |
|
|
|
|
|
|
|
|