|
»Click here to display Table of Contents«
|

/FRAME/MOV |

|

|

|

|
|
/FRAME/MOV |
|
|

|

|
|
»Click here to display Table of Contents«
|
/FRAME/MOV |
|
|
|
|
|
/FRAME/MOV |
|
|
|
|
Block Format Keyword
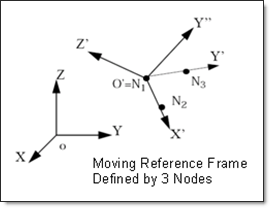
/FRAME/MOV - Moving Frames
Describes moving frames. Relative motion with respect to a reference frame.
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
/FRAME/MOV/frame_ID |
|||||||||
frame_title |
|||||||||
node_ID1 |
node_ID2 |
node_ID3 |
|
|
|
|
|
|
|
|
where,
Where,
The origin of the frame is defined by the position of N1. Nodes N1 and N2 define X’: Plane N1, N2 and N3 define Y’: Z’ is normal to plane X’ Y’
and Y’ is recomputed:
Reference frame identifier must be different from all skew identifiers. |