|
»Click here to display Table of Contents«
|

/FRAME/FIX |

|

|

|

|
|
/FRAME/FIX |
|
|

|

|
|
»Click here to display Table of Contents«
|
/FRAME/FIX |
|
|
|
|
|
/FRAME/FIX |
|
|
|
|
Block Format Keyword
/FRAME/FIX - Frames
Describes the frames.
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
/FRAME/FIX/frame_ID |
|||||||||
frame_title |
|||||||||
Ox |
Oy |
Oz |
|
|
|
|
|||
X1 |
Y1 |
Z1 |
|
|
|
|
|||
X2 |
Y2 |
Z2 |
|
|
|
|
|||
|
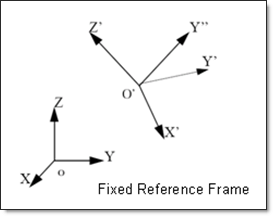
X’ = Y' Therefore, the new reference frame is defined by X’, Y'’, and Z’.
|