|
»Click here to display Table of Contents«
|

/INTER/TYPE23 |

|

|

|

|
|
/INTER/TYPE23 |
|
|

|

|
|
»Click here to display Table of Contents«
|
/INTER/TYPE23 |
|
|
|
|
|
/INTER/TYPE23 |
|
|
|
|
Block Format Keyword
/INTER/TYPE23 - Interface Type 23
Description
Defines a contact interface for airbag fabrics, modeling contact between a master surface and a slave surface which are supposed to belong to an airbag. This is a soft penalty contact which can deal with penetrations and intersections often coming in the folded airbag mesh. This interface can be used for self-impacting.
Format
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
/INTER/TYPE23/inter_ID/unit_ID |
|||||||||
inter_title |
|||||||||
surf_IDs |
surf_IDm |
Istf |
|
Igap |
|
Ibag |
Idel |
|
|
Fscalegap |
Gap_max |
Fpenmax |
|
|
|
||||
Stmin |
Stmax |
|
|
|
|
|
|||
Stfac |
Fric |
Gapmin |
Tstart |
Tstop |
|||||
IBC |
|
|
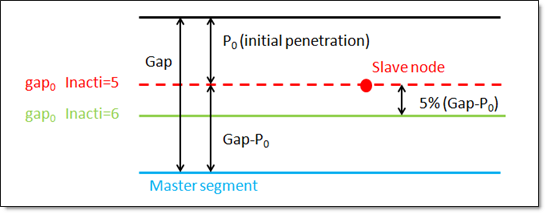
Inacti |
VISs |
|
|
Bumult |
||
Ifric |
Ifiltr |
Xfreq |
|
|
|
|
|
|
|
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
C1 |
C2 |
C3 |
C4 |
C5 |
|||||
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
C6 |
|
|
|
|
|||||
Blank |
|||||||||
Blank |
|||||||||
Blank |
|||||||||
|
|



 , and
, and