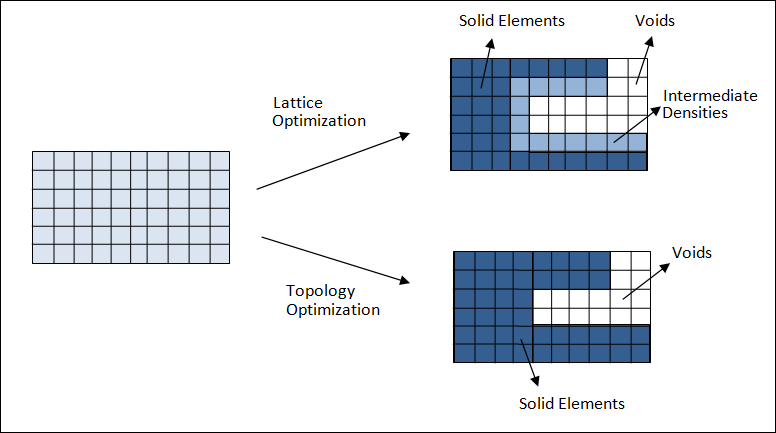
In the first phase, the design domains are optimized similar to a regular topology optimization, except that intermediate density elements are retained in the model. As explained above, this theoretically may improve performance of the optimized structure for considerations other than compliance (for example, buckling) when compared to a regular topology optimization. The intermediate densities in the optimized structure are represented by user-defined lattice types (micro-structures). The volume fraction of the lattice structure corresponds to the element density at the end of the first phase. During the optimization process, stiffness of the intermediate densities corresponds to micro-structural homogenized properties.
Definition
The first phase of the Lattice optimization process requires the inclusion of the LATTICE continuation line on all DTPL bulk data entries. This activates Lattice optimization, and the LB and UB fields can be used to specify the range of densities for elements that can be converted into Lattice elements. Elements with densities above UB remain as solid elements and those with densities lower than LB are removed from the model.
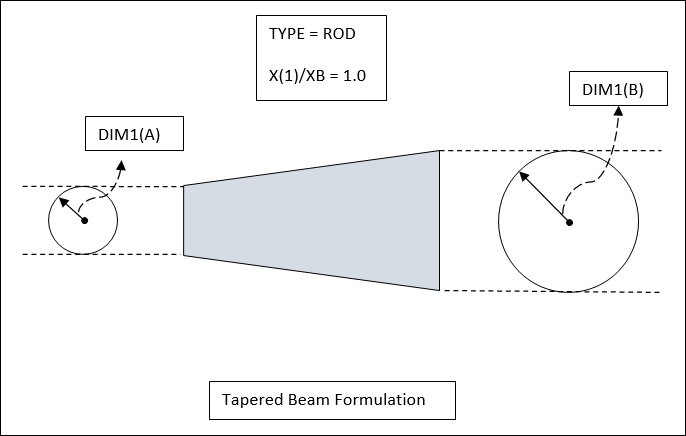
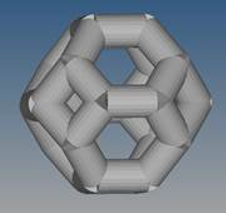
The solid elements which lie within the LB and UB density bounds (intermediate densities) defined on the LATTICE continuation line are replaced by the corresponding Lattice Structures (Lattice Type – LT). The solid elements can be first or second order elements. The lattice structures are constructed using 1D Tapered Beam (CBEAM) elements, as shown below. The initial radius of the lattice structure beam elements for each lattice structure cell is proportional to the density of the intermediate density elements which were replaced, such that the initial volume in phase 2 is equal to that at the end of phase 1. In phase 2, the concept of lattice beam element radius is interpreted as joint thickness. Thickness for each joint at the conjunction of lattice beam elements is determined and the radius of each element can vary across the beam length. The beam elements have the property PBEAML and TYPE=ROD is automatically assigned for each element. The thickness of this tapered beam element can vary along its length and only circular cross-sections are available. The X(1)/XB field on the PBEAML entry is always set to 1.0 for tapered beam elements.
For TYPE=ROD, if X(1)/XB is equal to 1.0, the DIM(1)A references the radius of the beam at end A and DIM(1)1 references the radius of the beam at end B. This element is a tapered beam formulation, and averaging is not used to determine the average radius of the beam. Instead, the true tapered beam formulation is used with the given dimensions. The true tapered beam formulation is only available for TYPE=ROD.
The LATSTR field on the LATTICE continuation line can be used to specify the stress constraint for the second phase (Stress Constraints).
The lattice type can be controlled using the LT field on the LATTICE continuation line. The values LT = 1, 2, 3, or 4 can be used to control the Lattice structure which replaces the intermediate density elements. LT=3 and LT=4 are currently only applicable to Hexahedral elements.
Below are the lattice types:
LT = 1: Hexahedral elements (CHEXA)
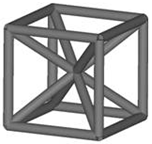
LT = 2: Hexahedral elements (CHEXA)
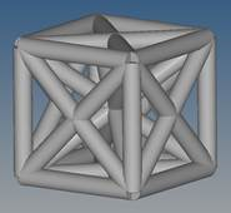
For LT = 2, CHEXA elements, the floating grid points at the center of lattice structure faces facing the adjacent solid element at the Lattice-Solid Interface are connected using automatically generated Freeze CONTACT. The automatic creation of such CONTACT is to make certain that the center nodes on the faces connected to the solid elements are not left floating (disconnected) in the second phase.
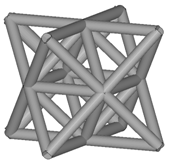
LT = 3: Hexahedral elements (CHEXA)
LT = 4: Hexahedral elements (CHEXA)
The following comments apply only to LT=4 Lattice:
| 1. | The lattice is based on newly created nodes only. Therefore, SPC’s and FORCE’s that existed in the original model and were applied to design domain will not be preserved and you will have to redefine them. |
| 2. | Contact interfaces with a minimum of one surface in the design domain will also not be preserved. OptiStruct internally creates new N2S contacts between the new nodes and solid elements. It is recommended to verify the newly generated contact interfaces to make certain the contact behavior is as expected. |
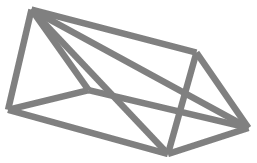
LT = 1 or LT = 2: Tetrahedral elements (CTETRA)
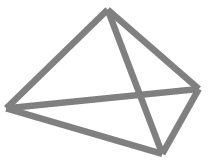
Pyramid elements (CPYRA)
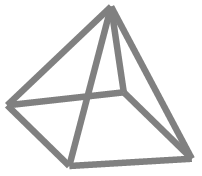
Pentahedron elements (CPENTA)
If a Lattice Optimization solver deck is named “<name>.fem”, then at the end of the first phase a new file “<name>_lattice.fem” is generated. This new file includes the 1D element data which represents the new Lattice Structure and the sizing optimization set-up. You have to redefine optimization responses, constraints, and the objective function; additionally the contact sets may also have to be redefined (Contact).
|







 ), which can lead to instability of the optimization run. Values lower than 6 (
), which can lead to instability of the optimization run. Values lower than 6 ( ). The default value is a reasonable approximation of the maximum ratio value and reduces instability.
). The default value is a reasonable approximation of the maximum ratio value and reduces instability.