OptiStruct solves topography optimization problems using shape optimization with internally generated shape variables. One or more design domains are defined using the DTPG card. These cards must, in turn, reference DESVAR, PSHELL, or PCOMP definitions. If a DESVAR definition is referenced, it must be a shape design variable, meaning that it must, in turn, be referenced by one or more DVGRID cards. If a PSHELL or PCOMP definition is referenced, OptiStruct generates shape variables using the parameters defined on the DTPG card, creating internal DVGRID data for the nodes associated with the PSHELL or PCOMP definitions. In both cases, the end result is that each DTPG card references a single shape variable. This shape variable then is converted into topography shape variables.
Basic topography shape variables follow the user-defined parameters on the DTPG card (minimum bead width, and draw angle), they are circular in shape, and laid out across the design domain in a roughly hexagonal distribution. Each topography shape variable has a circular central region of diameter equal to the minimum bead width. Grids within this region are perturbed as a group, which prevents the formation of any reinforcement bead of less than the minimum bead width. Grids outside of the central circular region of the topographical variables are perturbed as the average of the variables to which they are nearest. This results in smooth transitions between neighboring variables. If two adjacent variables are fully perturbed, all of the nodes between them will be fully perturbed. If one variable is fully perturbed and its neighbor is unperturbed, the nodes in between will form a smooth slope connecting them at an angle equal to the draw angle. The spacing of the variables is determined by the minimum bead width and the draw angle in such a way that no part of the bead reinforcement pattern forms an angle greater than the draw angle.
Pattern grouping options link topographical variables together in such a way that the desired reinforcement patterns are formed. Linear, planar, circular, radial, etc. shaped reinforcements are controlled by single variables, ensuring that the reinforcements follow the desired pattern. One-plane, two-plane, three-plane and cyclical symmetry pattern grouping options also use a similar approach to ensure that symmetry is created in the solution.
Although topography optimization is primarily a tool for creating bead type reinforcements in shell elements, it can accommodate solid models, as well. Many pattern grouping options (such as planar and cylindrical) are intended to be used with solid models since they effectively reduce 3D problems into 2D ones.
Variable Generation
There are three methods of automatically generating shape variables for topography optimization using the DTPG card. The first two, element normal and draw vector, are performed entirely in OptiStruct. The third (user-defined) requires that the input data contain one or more shape design variables that are used as the design domain.
Method
|
Description
|
Element normal
|
This is the easiest method to use. When norm is entered for the draw direction, the normal vectors of the elements are used to define the draw vector for the shape variables. This method is especially effective for curved surfaces and enclosed volumes where the beads are intended to be drawn normal to the surface.
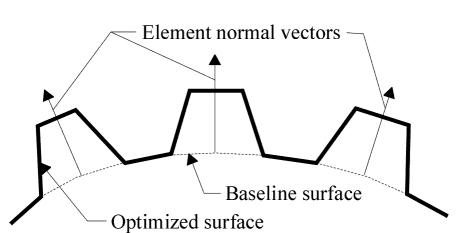
Beads created using the element normal method of determining draw vector.
|
Draw vector
|
This method allows you to define the draw vector that is used for generating the shape variables. The X, Y, and Z components of the draw vector in the nodal coordinate system are entered. This method is useful when all beads must be drawn in the same direction. Note that the draw angle may not be maintained while using this method.
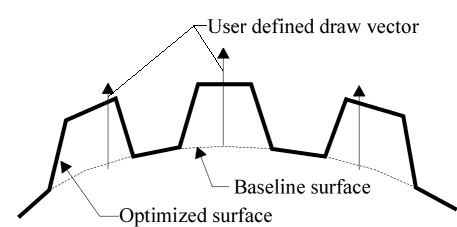
Beads created using the Draw vector method of determining draw vector.
|
User-defined
|
This method allows you to set up the vectors and heights for the topography optimization. A DESVAR card is referenced in place of a PSHELL or PCOMP card. All of the grids with DVGRID cards associated with that DESVAR card are considered part of the design domain. The DESVAR and DVGRID entries are redefined to reflect the minimum bead width and draw angle parameters that have been set by you. The vectors and magnitudes of the displacement vectors on each DVGRID card for each grid are retained, so these entries must be left blank on the DTPG card. This allows you to create a design domain in which each node can have its own draw vector and draw height.
|
Multiple Topography Design Regions
OptiStruct generates topography shape variables for each design domain defined by a DTPG card. It allows for overlapping of design domains. A grid that is in more than one design domain will be a part of shape variables for each design domain. For automatically generated bead variables, the draw height is divided by the number of bead variables acting on that grid. Thus, if a grid is a part of two DTPG cards that have draw heights of 3.0mm and 5.0mm, the draw heights become 1.5mm and 2.5mm. If this is not desired, simply make sure that no grid is in more than one design domain. In cases where two design components touch each other and the design domains are not user-defined (PSHELL or PCOMP definitions are referenced), a row of non-design elements needs to be inserted between them to prevent averaging. If the bead variables are user-defined (DESVAR definition is referenced), no averaging will be performed. It is assumed that you intend to have the shape variables overlap, which will result in the grid deflection being cumulative between multiple influencing bead cards.
Bead Discreteness Fraction
The bead discreteness fraction is a response that can be used to control the amount of shape variation for topography design domains. This response indicates the amount of shape variation for one or more topography design domains. The response varies in the range 0.0 to 1.0 (0.0 < BEADFRAC < 1.0), where 0.0 indicates that no shape variation has occurred, and 1.0 indicates that the entire topography design domain has assumed the maximum allowed shape variation.
|






