|
»Click here to display Table of Contents«
|

Bodies |

|

|

|

|
|
Bodies |
|
|

|

|
|
»Click here to display Table of Contents«
|
Bodies |
|
|
|
|
|
Bodies |
|
|
|
|
This section describes the Body entity of MotionView and shows the various usage, creation, and editing methods.
The figure below shows the three types of Bodies (and their properties) available in MotionView for multibody systems: Rigid, Point Mass, and Deformable.
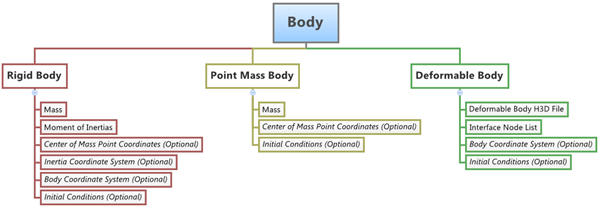
Rigid Body
In a multibody system, a Rigid body is an ideal representation of solid body/part of fixed size and shape in which deformation is insignificant or neglected, or in other words, the distance between any two points of a Rigid body remains unchanged (irrespective of the external forces acting on it).
A Rigid body will have six degrees of freedom (DOF) and therefore every additional Rigid body in a multibody system adds an additional six DOF to the system.
The Rigid body can be of two types: Movable and Fixed. The Fixed type of Rigid body is also called a Ground body. The Ground body represents the Newtonian reference frame. It is, by default and definition, at complete rest. In MotionView, the Ground body exists by default in every model.
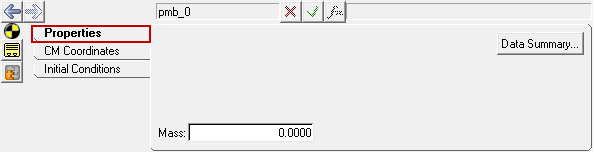
Point Mass Body
The Point Mass body is a reduced version of the six DOF Rigid body. It only has three translational DOF, therefore the Point Mass body has mass, but no inertia properties. The position of a point mass is defined by a center of mass point. By default, the orientation of the point mass is set to be the same as the Global Coordinate System (which never changes during simulation). The purpose of a Point Mass entity is to add additional representative weight to another body, for example the mass of a driver on a seat.
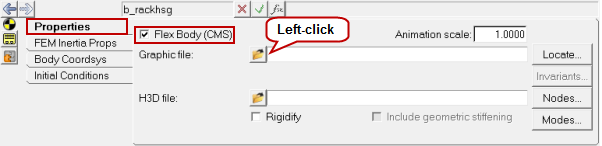
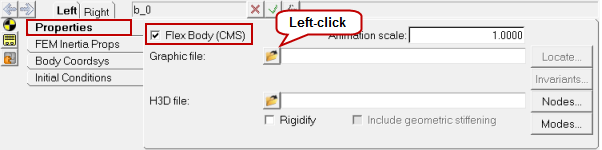
Deformable Body (also known as Flexible Body)
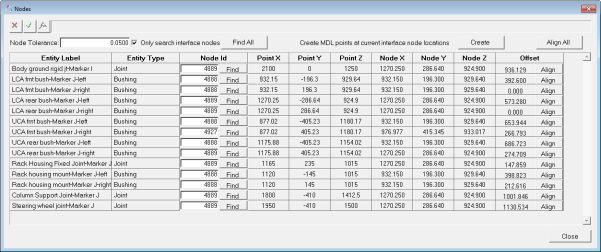
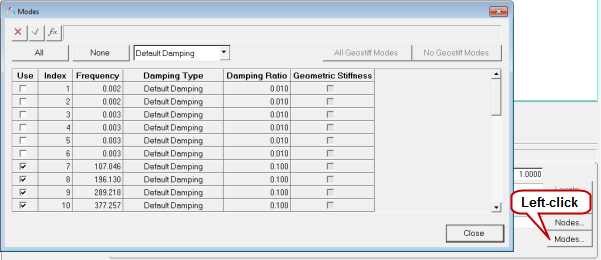
Deformable bodies in multibody systems are those that can be used to model elastic deformation of the bodies of the system. The Deformable body connects to its neighboring elements/bodies through interface nodes. The Deformable body consists of reduced stiffness and mass matrices, which can be obtained in various ways. Two popular methods for the same are: Craig-Bampton Method and Craig-Chang Method.
Properties of a Deformable body are defined using a Flexbody H3D file. The Flexbody H3D file is created using the Component Mode Systems Method of FE Analysis. Flexbody H3D files can be created using the Altair OptiStruct FE Solver. In MotionView, the Utility Flexbody Prep can be used to create Flexbody files from FE models.
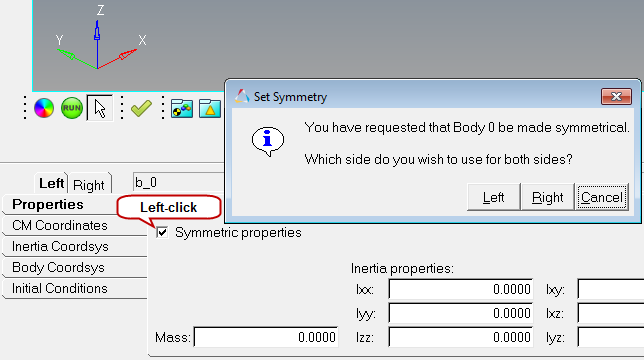
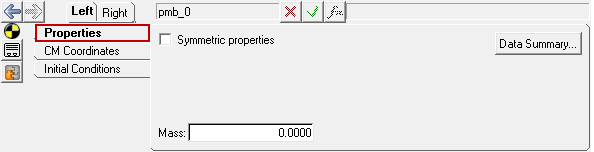
MotionView supports creation of the above types of bodies described as Single body or a Pair body. For a Pair body, the properties can be made symmetric to the Global Z-X plane (except for a deformable body pair).
Click on each Body type below to view the corresponding properties:
|
|
|
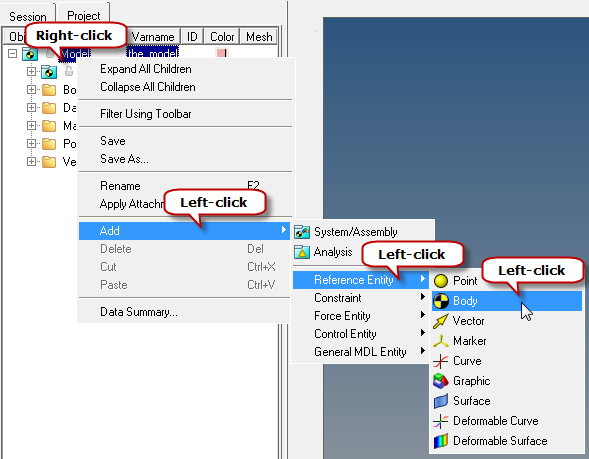
To learn how to add an "Entity" to a model, please see the Entity Manual topic.
OR
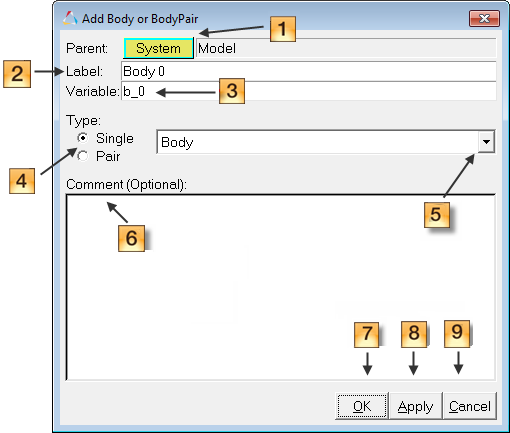
The Add Body or BodyPair dialog is displayed
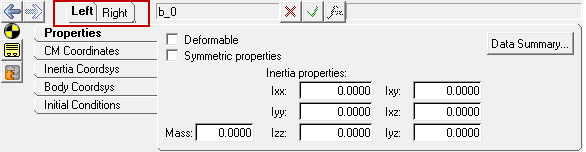
Note - By default variables names of entities in MotionView follow a certain convention. For example, all Body entities have a variable name starting with “b_”. This is the recommended convention to follow when building models in MotionView since it has many advantages in model editing and model manipulation.
Note - A Body entity (like most of the entities that are created in MotionView) can be a Single entity or a Pair entity. The Pair entities help in creating models which are symmetric about the Z-X Plane of the model. Their properties can also be symmetric about the Z-X Plane (or in other words, the Y property is mirrored).
|
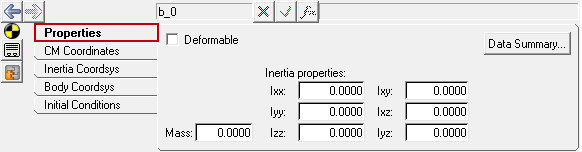
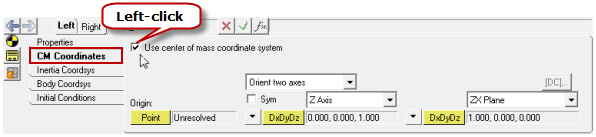
Click on each body type listed below to learn more about using the Bodies panel to edit body properties:
|
| Note | Properties of several bodies can be edited simultaneously using the Data Summary dialog. |
Bodies can also be created in the following ways in MotionView:
| • | Using MDL statements in an MDL file |
| • | Using the HyperWorks Tcl API |
MotionView models are saved as Model Definition Language (MDL) statements in text files. MDL is a text based language and can be easily created using any Text Editor. Each type of body (listed below) needs an appropriate set of MDL statements for proper definition in the model.
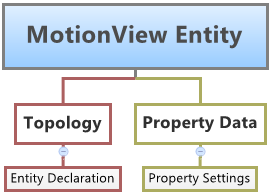
MDL Entity Definition The definition of every entity that is created in MotionView is divided into two parts: Topology and Property. Therefore in most cases, two or more statements must be used to create an entity using MDL. The following eight body types can be created using MDL:
|
A body can be added to the model using the HyperWorks TCL API. The benefit of using this method is that it facilitates automated model building. If the model is of a known configuration then precious time can be saved by automating the model building process by writing a TCL script to do all, or a portion, of the model building. There are two commands which can be used to add or edit bodies in MotionView:
These two commands go hand in hand and will create a Body entity with the variable and label specified in them. Note - Extended definitions for InterpretEntity and InterpretSet can be found in the HyperWorks Desktop Reference Guide. For every entity that is to be added to the model, four lines of TCL code are necessary:
Note - For editing an existing entity, only command lines 2 and 3 (above) are necessary.
Tcl commands can be executed one by one using the Command Window (View > Command Window), or they can be part of a Tcl script which can be executed also from File > Run > Tcl/Tk Script menu option. To learn this method of model building in more detail please refer to tutorial MV-1040: Model Building Using Tcl. |
When the Body entity gets exported to MotionSolve, it is exported into the XML Model statements listed in the table below:
ID |
Body Type |
XML Statement |
|---|---|---|
1 |
Rigid Body |
Body_Rigid |
2 |
Point Mass Body |
Body_Point |
3 |
Deformable Body |
Body_Flexible and Reference_Flexdata |
Click on the body type below to view the corresponding syntax for each XML statement:
Syntax: <Body_Rigid> id = "integer" [ cg_id = "integer" ] [ im_id = "integer" ] [ isground = { "TRUE" | "FALSE" } ] [ mass = "real" ] [ inertia_xx = "real" inertia_yy = "real" inertia_zz = "real" inertia_xy = "real" inertia_yz = "real" inertia_xz = "real" ] [ v_ic_x = "real" ] [ v_ic_y = "real" ] [ v_ic_z = "real" ] [ w_ic_x = "real" w_ic_y = "real" w_ic_z = "real" ] [ v_ic_x_flag = { "TRUE" | "FALSE" } ] [ v_ic_y_flag = { "TRUE" | "FALSE" } ] [ v_ic_z_flag = { "TRUE" | "FALSE" } ] [ w_ic_flag = { "TRUE" | "FALSE" } ] </Body_Rigid > |
Syntax: <Body_Point> id = "integer" cg_id = "integer" mass = "real" v_ic_x = "real" v_ic_y = "real" v_ic_z = "real" v_ic_x_flag = { "TRUE" | "FALSE" } v_ic_y_flag = { "TRUE" | "FALSE" } v_ic_z_flag = { "TRUE" | "FALSE" } </Body_Point> |
In the case of the Deformable body the body definition is split into two XML statements:
Note - The Body_Flexible statement refers to the Reference_Flexdata statement. To understand the complete syntax of the MotionSolve XML statements please refer to the MotionSolve Reference Guide. |
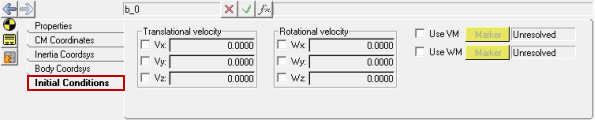
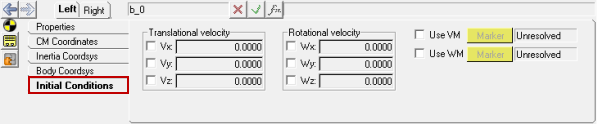
Initial conditions can be specified for Rigid and Point Mass bodies located in a model.
Initial conditions can be specified to the Rigid bodies in a particular model in two ways:
In either case mentioned above the initial conditions need to be set using two statements: an initial condition settings flag and then the initial condition value.
|
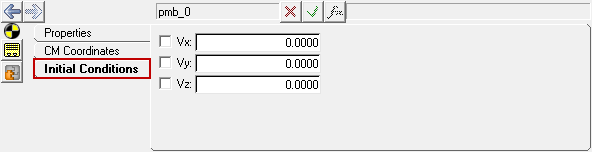
Initial conditions can be specified for the Point Mass bodies in a particular model in two ways:
In either case mentioned above the initial conditions need to be set using two statements: an initial condition settings flag and then the initial condition value.
|
The following example files are available:
The example below shows the different types of body entities created in a model. It also shows a body that has been parameterized.
|
The example below shows the different types bodies created using Tcl.
|
See Also:
*Body() (MDL Model Statement)
mdlIObject InterpretEntity (Tcl Command)
mdlIObject InterpretSet (Tcl Command)