The Bodies panel allows you to add either a rigid or deformable/flexible body to your MotionView model.
A body is the primary entity in an MBD model with certain degrees of freedom (DOF). It is described by mass at a certain location represented through a center of mass coordinate system (CM coordinate system or CM marker) and mass moment of inertia with regard to a coordinate system called inertia coordinate system (IM marker).
A rigid body has six degrees of freedom.
| 1. | Select the container entity (Model|System|Assembly|Analysis) folder in the Project Browser, under which the body is to be added. |
| 2. | Right click on a body folder (located under the selected container entity) and select Add Body from the context menu. |
OR
| - | Right-click the Bodies button  on the Reference toolbar. on the Reference toolbar. |
OR
| - | Right-click on a system folder in the Project Browser and select Add > Reference Entity > Body from the context menu. |
The Add Body or BodyPair dialog is displayed.
| 3. | Specify a Label and Variable. |
The Variable should be unique to the container into which the body is being defined.
| 4. | Select a Type: activate the radio option for Single (to define a single body) or Pair (to define a pair body). |
| 5. | Verify that Body is selected in the drop-down menu. |
| 6. | Add additional bodies or close the dialog: |
| - | Click Apply to add more bodies. The current body definition would be added to the model and the dialog will repeat again to add another body. |
| - | Click OK to add the current body and exit the dialog. |
| - | Click Cancel to cancel adding the current body definition and exit the dialog. |
A rigid body in MotionView is exported as <Body_Rigid/> to MotionSolve or as a PART statement to ADAMS.
|
Deformable/Flexible Bodies
Deformable bodies can be defined in MotionView models and are represented in some solvers (MotionSolve, ADAMS) as flexible bodies, while in other solvers (Abaqus) they can be actual Finite Element models. Flexbodies are created from Finite Element models. In a flexible body, a certain number and shape of modal deformations form the degrees of freedom for the body. A flexible body is generated by a FE model reduction process called Component Mode Synthesis, where a full finite element model with large number of nodes is reduced to a modal form represented by a few finite number of nodes. These nodes are referred to as interface nodes.
A deformable body is exported as <Body_Flexible/> to MotionSolve or as FLEX_BODY statement to ADAMS.
Point Mass Body
A Point Mass body is a special form of rigid body, which allows defining a body with reduced degrees of freedom (DOF). A Point Mass body has the DOF reduced to three translation degrees of freedom, and it has no rotational DOF.
| 1. | Select the container entity (Model|System|Assembly|Analysis) folder in the Project Browser under which the body is to be added. |
| 2. | Right click on a body folder (located under the selected container entity) and select Add Body from the context menu. |
OR
Right-click the Bodies button on the Reference toolbar.
OR
| - | Right-click on a system folder in the Project Browser and select Add > Reference Entity > Body from the context menu. |
The Add Body or BodyPair dialog is displayed.
| 3. | Specify a Label and Variable. |
The Variable should be unique to the container into which the body is being defined.
| 4. | Select a Type: activate the radio option for Single (to define a single body) or Pair (to define a pair body). |
| 5. | Select Point Mass Body from the drop-down menu. |
| 6. | Add additional bodies or close the dialog: |
| - | Click Apply to add more bodies. The current body definition would be added to the model and the dialog will repeat again to add another body. |
| - | Click OK to add the current body and exit the dialog. |
| - | Click Cancel to cancel adding the current body definition and exit the dialog. |
A rigid body in MotionView is exported as <Body_Point/> to MotionSolve or as a PART statement to ADAMS.
|
NLFE Body
An NLFE Body is a non linear finite element body. Currently the element types that are supported are beam and cable.
| 1. | Select the container entity (Model|System|Assembly|Analysis) folder in the Project Browser under which the body is to be added. |
| 2. | Right click on a body folder (located under the selected container entity) and select Add Body from the context menu. |
OR
Right-click the Bodies button on the Reference toolbar.
OR
| - | Right-click on a system folder in the Project Browser and select Add > Reference Entity > Body from the context menu. |
The Add Body or BodyPair dialog is displayed.
| 3. | Specify a Label and Variable. |
The Variable should be unique to the container into which the body is being defined.
| 4. | Select NLFE Body from the Type drop-down menu. |
Note - only single NLFE bodies can be added (no pairs).
| 5. | Add additional bodies or close the dialog: |
| - | Click Apply to add more bodies. The current body definition would be added to the model and the dialog will repeat again to add another body. |
| - | Click OK to add the current body and exit the dialog. |
| - | Click Cancel to cancel adding the current body definition and exit the dialog. |
An NLFE body is exported as <Body_Flexible/> to MotionSolve. This type of body is supported for MotionSolve only.
|
Modifying Body Properties
You can modify the properties of a body by doing the following:
| 1. | Click on the Bodies panel button on the Reference toolbar. |
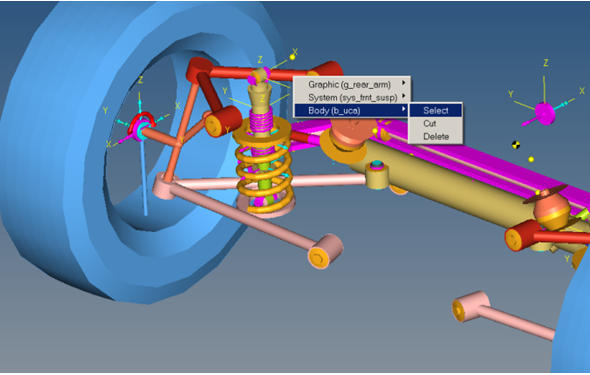
| 2. | Click on any visible graphic associated with the body or the body implicit graphic in the graphics area. |
Note You can also select the body by clicking on the Body listed in the Project Browser.
OR
Right-click on the visible graphic (implicit or explicit) in the graphics area. From the context menu, select the relevant body variable name and click Select.
| 3. | The Bodies panel is displayed. Navigate between any tabs to suitably modify the properties of the selected body. |
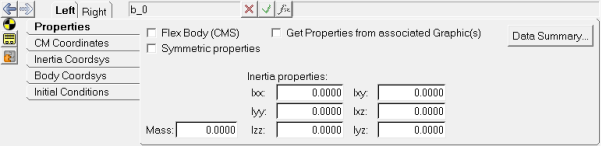
The Bodies panel contains the following tabs:
Properties
Center of Mass Coordinates
Inertia Coordinate System
Body Coordinate System
Initial Conditions
See Also:
Adding a Flexbody to a Model
Merging Bodies
NLFE Body Panel
Body_Rigid (MotionSolve XML Format Model Statement)
Body_Flexible (MotionSolve XML Format Model Statement)
*Body() (MDL Statement)






