The Properties tab allows you to define the mass and inertia properties (Ixx, Iyy, Izz, Ixy, Ixz, Iyz) of a rigid body or define the body as a Flex Body.
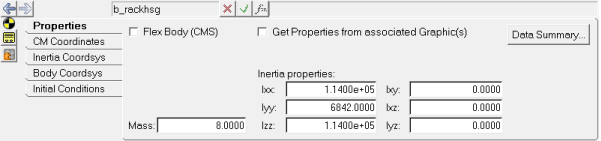
Bodies panel - Properties tab
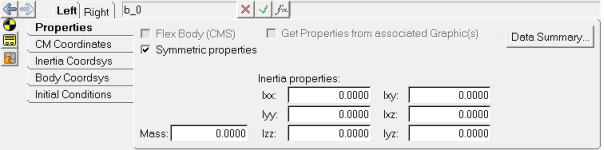
Bodies panel - Properties tab - Symmetric Pair
Flex Body (CMS)
(formerly Deformable)
|
Check this option to convert a rigid body definition to a flexible/deformable body.
|
Symmetric properties
|
Applicable for body pair definition. See Comment 7 and Comment 8 below.
|
Get Properties from associated Graphic(s)
|
Check this option to get the mass and inertia properties from the graphic associated with the body. See Comment 6 below.
Note - Activating this option will deactivate the Mass and Inertia properties fields, and the CM Coordinates and Inertia Coordsys tabs.
|
Mass
|
The mass of the body.
|
Inertia properties
|
The mass moment of inertia about X, Y, and Z axes respectively.
|
|
Ixx, Iyy, Izz
|
The mass moment of inertia about X, Y, and Z axes respectively.
|
|
Ixy, Ixz, Iyz
|
The mass products of inertia.
|
Comments:
| 2. | MotionView does not check for the physical correctness of the properties entered in the field (for example: I1 +I2 >= I3 where I1, I2, and I3 are the principal moment of inertia of the body). |
| 3. | Specifying symmetric properties makes both pairs have the same properties values. Verify the correctness of data by considering the orientation of the Inertia coordinate system. |
| 4. | Symmetric properties are not applicable for deformable body pair. Uncheck symmetric properties before changing a rigid body pair to Flex Body (CMS). |
| 5. | When a body is converted to flexible/deformable, the property tab changes to accommodate flexible/deformable body definition. Refer Adding a Flexbody to a model for additional information. |
| 6. | When the Get Properties from associated Graphic(s) option is activated: |
| - | The property values (mass, inertia and CM origin) are obtained from the following type of Graphics: Cylinder (Both ends capped), Box, Sphere and CADGraphic. File Graphics (H3d) is currently not supported. |
| - | The CM marker orientation is aligned with Global Frame. The Inertia coordinate system is deactivated, which means that the inertia properties displayed are with respect to the CM marker. |
| 7. | Symmetric pair is not applicable in case of flexible body pair. Symmetry cannot be defined along with “Get Properties from Graphics”. By default, MotionView considers the same values of properties for both the left and right side. |
| 8. | In version 14.0, a new Use updated symmetry option is available under Tools menu > Options > Build Model. Using this option allows a truly symmetric rigid body to be represented (where properties represent bodies which are mirror with regard to each other about the Global ZX plane). |
See Also:
Body_Rigid (MotionSolve XML Format Model Statement)
Body_Flexible (MotionSolve XML Format Model Statement)
Reference_FlexData (MotionSolve XML Format Model Statement)





