|
»Click here to display Table of Contents«
|

Constraint Entities |

|

|

|

|
|
Constraint Entities |
|
|
|

|
|
»Click here to display Table of Contents«
|
Constraint Entities |
|
|
|
|
|
Constraint Entities |
|
|
|
|
This section provides an overview of the various forms of constraints available in MotionView.
A Constraint is an idealized mechanical connection which restricts relative motion between bodies. There are many different forms of constraint entities that can be used to restrict relative movement between interconnected bodies. A constraint, in effect, removes degrees of freedom from a mechanical system. The figure below shows a classification of the constraints available in MotionView:
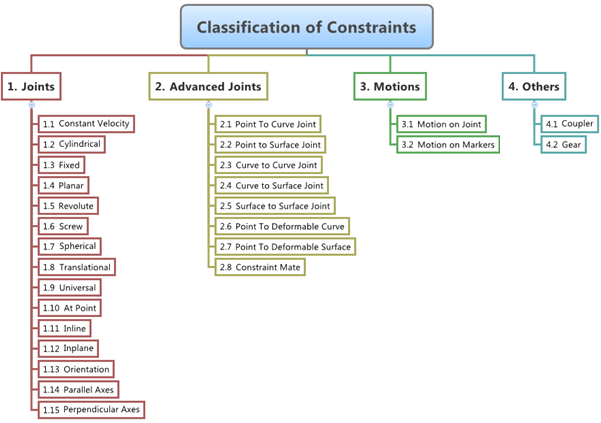
Constraints can be classified into four main categories:
Category |
Description |
|---|---|
Joints |
Joints are constraints that can be defined between two reference frames each belonging to a different body. |
Advanced Joints |
Advanced Joints define constraints using graphical elements such as a curve or surface. In addition, some form of constraints such as Constraint Mate are classified as Advanced Joints. |
Motion
|
A Motion is a prescribed displacement, velocity or acceleration on a body along a specified direction. Motion is applied either through a few select types of joints or also through markers. A prescribed motion is applied along the free degrees of freedom of the body, thereby removing the available degree of freedom. Thus a Motion is considered a constraint. |
Other Constraints
|
This classification consists of constraints which are used to specify algebraic relations between degrees of freedom of two or more joints.
|
| Note | Click on the individual links (above) to learn more about each specific type of constraint. |