|
»Click here to display Table of Contents«
|

CBEAM |

|

|

|

|
|
CBEAM |
|
|

|

|
|
»Click here to display Table of Contents«
|
CBEAM |
|
|
|
|
|
CBEAM |
|
|
|
|
Bulk Data Entry
CBEAM – Beam Element Connection
Description
The CBEAM bulk data entry defines a beam element (BEAM) of the structural model.
Format
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
CBEAM |
EID |
PID |
GA |
GB |
X1/G0 |
X2 |
X3 |
OFFT |
|
|
PA |
PB |
W1A |
W2A |
W3A |
W1B |
W2B |
W3B |
|
|
Field |
Contents |
EID |
Unique element identification number. No default (Integer > 0) |
PID |
PBEAM or PBEAML property entry identification number. Default = EID (Integer > 0) |
GA,GB |
Grid point identification numbers of connection points. No default (Integer > 0; GA ≠ GB) |
X1,X2,X3 |
Components of vector v, at end A, measured at the offset point for end A, parallel to the components of the displacement coordinate system for GA, or the basic coordinate system, to determine (with the vector from offset end A to offset end B) the orientation of the element coordinate system for the beam element. See comment 4. No default (Real; See comment 2) |
G0 |
Grid point identification number to optionally supply X1, X2, X3. Direction of orientation vector is GA to G0. No default (Integer > 0; See comment 2). |
OFFT |
Character string specifying the interpretation of the offset vector specification. See comment 4. Default = GGG (Character or blank) |
PA, PB |
Pin flags for beam ends A and B, respectively. Used to remove connections between the grid point and selected degrees-of-freedom of the beam. The degrees-of-freedom are defined in the element’s coordinate system and the pin flags are applied at the offset ends of the beam. The beam must have stiffness associated with the PA and PB degrees-of-freedom to be released by the pin flags. For example, if PA=4, the PBEAM entry must have a non-zero value for J, the torsion stiffness. No default (Integer > 0; up to 5 of the unique digits 1-6 with no embedded blanks) |
W1A,W2A,W3A, |
Components of offset vectors, measured in the displacement coordinate systems at grid points A and B or in the element coordinate system, from the grid points to the end points of the axis of shear center. See comment 4. Default = blank (Real or blank) |
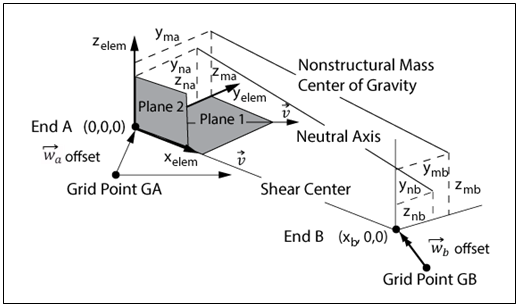
Fig 1: Beam element coordinate system.
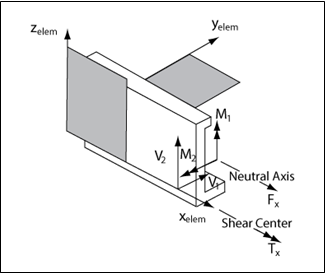
Fig 2: Direction of Internal Forces and Moments (for CBEAM entry)
| 1. | If X1/G0 is a positive integer and X2 and X3 are blank, then G0 is used to orient the element, otherwise X1, X2, X3 is used. |
| 2. | G0 ≠ GA or GB. |
| 3. | If there are no pin flags or offsets the continuation may be omitted. |
| 4. | The OFFT character string specifies how the offset and orientation vector components are computed. By default, the offset vectors are specified in the Global (local displacement) coordinate system of each grid A and B, and the orientation vector is specified in the Global coordinate system of grid A. Using the codes below, the offset vector can be specified in the element coordinate system and the orientation vector can be specified in the basic coordinate system. The valid character strings and their meanings are shown below: |
OFFT |
Orientation Vector |
End A Offset |
End B Offset |
|---|---|---|---|
GGG |
Global |
Global |
Global |
BGG |
Basic |
Global |
Global |
GGO |
Global |
Global |
Element |
BGO |
Basic |
Global |
Element |
GOG |
Global |
Element |
Global |
BOG |
Basic |
Element |
Global |
GOO |
Global |
Element |
Element |
BOO |
Basic |
Element |
Element |
The element system x-axis is defined from GA to GB. The orientation vector and the element system x-axis are then used to define the z and y axes of the element system. A vector is formed from the cross product of a vector going from Grid A to Grid B and the orientation vector to create the element coordinate z-direction.
| 5. | Offset vectors are treated like rigid elements. The length of the offset vectors is not affected by thermal loads. |
| 6. | Torsional stiffness due to warping of the cross-section is not considered. |
| 7. | This card is represented as a bar2 element in HyperMesh. |
See Also: