|
»Click here to display Table of Contents«
|

/INIVEL/AXIS |

|

|

|

|
|
/INIVEL/AXIS |
|
|

|

|
|
»Click here to display Table of Contents«
|
/INIVEL/AXIS |
|
|
|
|
|
/INIVEL/AXIS |
|
|
|
|
Block Format Keyword
Description
Initialize both translational and rotational velocities on a group of nodes in a given coordinate system.
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
/INIVEL/AXIS/inivel_ID/unit_ID |
|||||||||
inivel_axis_title |
|||||||||
Dir |
frame_ID |
grnd_ID |
|
|
|
|
|
|
|
Vxt |
Vyt |
Vzt |
Vr |
|
|
||||
|
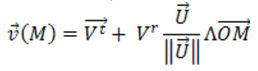
Where, U is the vector defining the rotation axis. O is the center of the local coordinate system and M is the nodal point. Vr is the rotation velocity Vt is the vector of translational velocity
|
See Also: