Pattern grouping is a feature where you can define a single part of the domain that should be designed in a certain pattern.
Planar Symmetry
It is often desirable to produce a design that has symmetry. Unfortunately, even if the design space and boundary conditions are symmetric, conventional free-size optimization methods do not guarantee a perfectly symmetric design.
By using symmetry constraints in free-size optimization, symmetric designs can be attained regardless of the initial mesh, boundary conditions, or loads. Symmetry can be enforced across one plane, two orthogonal planes, or three orthogonal planes. A symmetric mesh is not necessary, as OptiStruct will create variables that are very close to identical across the plane(s) of symmetry.
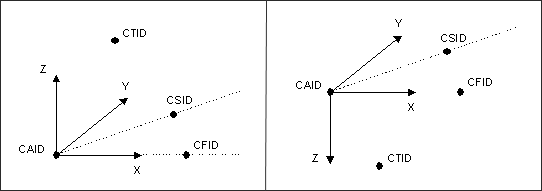
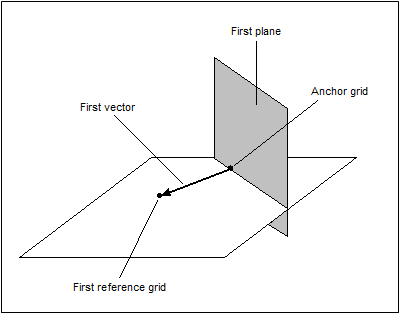
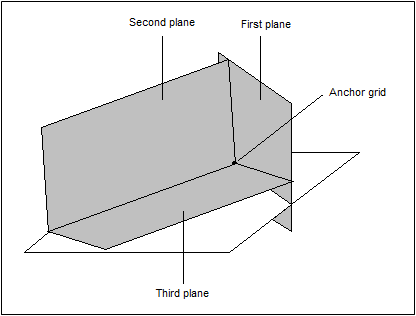
To define symmetry across one plane, it is necessary to provide an anchor grid and a reference grid. The first vector runs from the anchor grid to the reference grid. The plane of symmetry is normal to that vector and passes through the anchor grid.
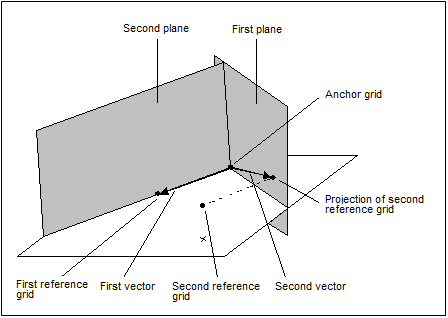
To define symmetry across two planes, a second reference grid needs to be provided. The second vector runs from the anchor grid to the projection of the second reference grid onto the first plane of symmetry. The second plane of symmetry is normal to that vector and passes through the anchor grid.
To define symmetry across three planes, no additional information is required, other than to indicate that a third plane of symmetry is to be used. The third plane of symmetry is perpendicular to the first two planes of symmetry, and also passes through the anchor grid.
Uniform Element Thickness
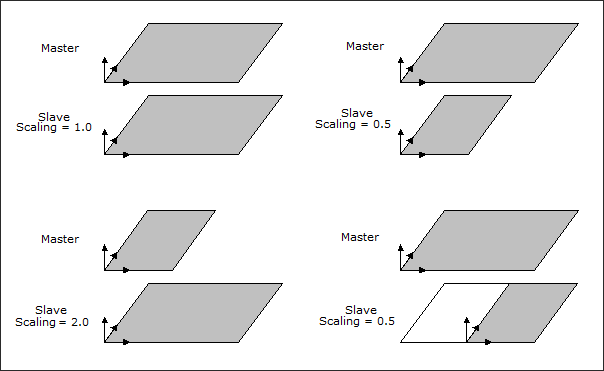
Pattern grouping also provides the possibility to request a uniform element thickness throughout selected components.
This pattern group ensures that all elements of selected components maintain the same element thickness with respect to one another.
Cyclical Symmetry
Cyclical symmetry can also be defined through the use of pattern grouping.
With cyclical pattern grouping, the design is repeated about a central axis a number of times determined by you. Furthermore, the cyclical repetitions can be symmetric within themselves. If that option is selected, OptiStruct will force each wedge to be symmetric about its centerline.
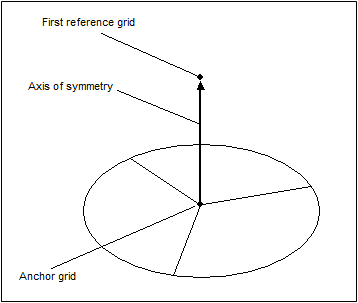
To define cyclical symmetry, it is necessary to provide an anchor grid and a reference grid. The axis of symmetry runs from the anchor grid to the reference grid. It is also necessary to specify the number of cycles; the repetition angle will be automatically computed.
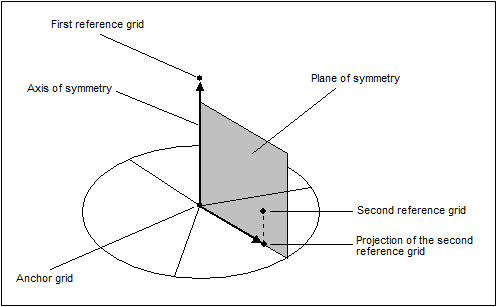
To add planar symmetry within each wedge, a second reference grid needs to be provided. The plane of symmetry is determined by the anchor grid and the two reference grids.
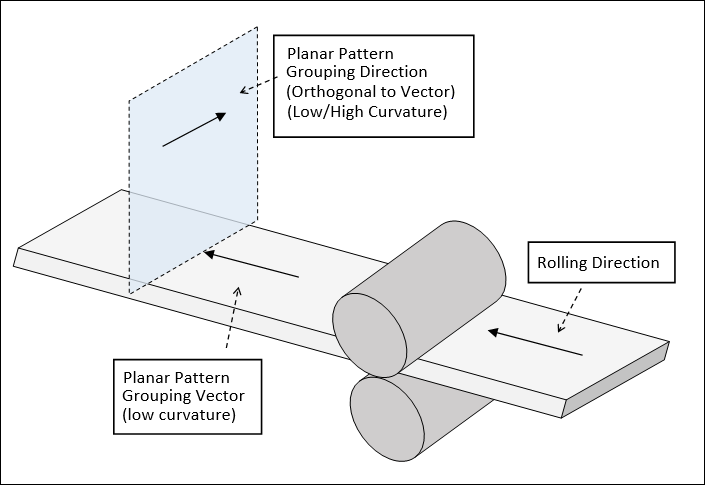
Linear and Planar Pattern Grouping (TYP=20 and TYP=21)
Linear pattern grouping requires that the anchor point and first point be defined. A vector from the anchor point to the first point defines the direction in which the thickness is set to be constant. Linear pattern grouping is typically designed to handle models with minimal or no curvature in the specified vector direction (which is typically orthogonal to the rolling direction in rolling applications). For models with low curvature in the vector direction, appropriate projections to the surface are used to determine the direction on the surface. For models with high curvature in the vector direction, depending on the direction of the specified vector, the direction may become orthogonal to the surface whereby the pattern grouping direction cannot be determined. In such cases, Planar Pattern Grouping (TYP = 21) is recommended.
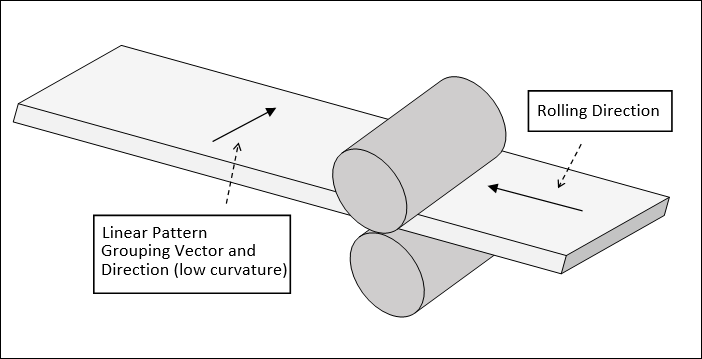
Planar pattern grouping requires that the anchor point and first point be defined. A vector from the anchor point to the first point is defined and thickness of the model in the various orthogonal planes to this vector is set to be constant. Planar pattern grouping is designed to handle models with high curvature in the orthogonal planes of the defined vector, and with minimal or no curvature in the direction of the defined vector. The vector defined in planar pattern grouping should typically lie in the rolling direction in rolling applications. This feature can handle large curvature in the slicing plane orthogonal to the defined vector. Planar pattern grouping cannot be used if large curvature exists in the rolling direction.
|