|
»Click here to display Table of Contents«
|

NLPARMX |

|

|

|

|
|
NLPARMX |
|
|

|

|
|
»Click here to display Table of Contents«
|
NLPARMX |
|
|
|
|
|
NLPARMX |
|
|
|
|
Bulk Data Entry
NLPARMX – Optional Parameters for Geometric Nonlinear Implicit Static Analysis Control
Description
Defines additional parameters for geometric nonlinear implicit static analysis.
Format
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
NLPARMX |
ID |
TA0 |
DTA |
DTTH |
NPRINT |
RFILE |
|
|
|
|
SOLV |
TSCTRL |
DTMIN |
DTMAX |
LSMETH |
RREFIF |
NCYCLE |
FIXTID/ |
|
|
KINER |
DTSCQ |
ILIN |
SMDISP |
SPRBK |
|
|
|
|
|
ITW |
DTSCI |
LDTN |
DTSCD |
LARC |
CTYP |
WSCAL |
|
|
|
|
|
Field |
Contents |
ID |
An associated NLPARM entry identification number. No default (Integer > 0) |
TA0 |
Start time for writing animation files. Default = 0.0 (Real > 0) |
DTA |
Output time step for animation files. If zero, no output. See comment 3. Default = DTINI (Real > 0) |
DTTH |
Output time step for time history files. If zero, no output. See comment 3. Default = 0.1*DTINI (Real > 0) |
NPRINT |
Print every NPRINT iterations. If negative, to .out and standard output. If positive, only to .out file. Default = -1 (Integer) |
RFILE |
Cycle frequency to write restart file for nonlinear iteration. Default = 5000 (Integer > 0) |
SOLV |
Geometric nonlinear implicit solution method. NEWT – Modified Newton BFGS – BFGS quasi-Newton method Default = NEWT (Character = NEWT or BFGS) |
TSCTRL |
Time step control. ARC – Arc-length is used to accelerate and control the convergence. The time step is determined by displacement norm control (arc-length). SIMP – Simple time step control. RIKS – Riks method for post-buckling analysis (only with SOLV = NEWT). NONE – No time step control. A warning will be issued. In the case of divergence the time step will be repeated with half the step size. The run will be terminated according to DTMIN and NCYCLE. Default = ARC (Character) |
DTMIN |
Minimum implicit time step. If DTMIN is reached, simulation will be terminated. See comment 3. Default = 1e-4*DTINI (Real > 0) |
DTMAX |
Maximum implicit time step from which time step is set constant. See comment 3. Default = 3*DTINI (Real > 0) |
LSMETH |
Line search method. Default = ENERGY (Character = NONE, FORCE, ENERGY, or AUTO) |
RREFIF |
Special residual force computation with contact interfaces present. Default = no special treatment (Integer = 0, …, 5) 0 – Aggressive (modified entirely by the out-of-balance value) 1 – Average (modified each time with 200% maximum) 2 – Light (modified each time with 20% maximum) 3 – No modification 4 – No modification; except for the first contact. 5 – Modified automatically (for imposed displacement only) |
NCYCLE |
Maximum number of time steps. If reached, solution will be terminated. = 0: means no limit. Default = no limit (Integer > 0) |
FIXTID |
A TABLEDi entry identification number. The x values of the table define fixed time points that the automatic time step control will adhere to. (Integer > 0) |
TOUT |
The method to determine the fixed time point. AUTO – Fully automatic time step control. Default = AUTO (AUTO or NLOAD) |
KINER |
Inertia Stiffness for handling models that are not sufficiently constrained. May require definition of DTSCQ. See comment 4. Default = OFF (Character = ON or OFF) |
DTSCQ |
Scale factor for inertia stiffness matrix used in quasi-static analysis (KINER = ON, See comment 4). Default = 1.0 (Real > 0) |
ILIN |
Perform linear instead of nonlinear analysis. For debugging purposes. (ANALYSIS = NLGEOM, See comment 5). LIN – Linear analysis without contact. LINC – Linear analysis with contact. Default is nonlinear analysis (Character = LIN or LINC) |
SMDISP |
Perform small displacement and rotation analysis instead of geometric nonlinear analysis. PARAM, SMDISP, 1 overwrites this definition. OFF – Geometric nonlinear analysis. ON – Small displacements and small rotations analysis. Default = OFF (Character = ON or OFF) |
SPRBK |
Perform spring back analysis. Equilibrium is reached when the internal forces are less or equal to the tolerances given on NLPARM. OFF – Regular analysis. ON – Spring back analysis. Default = OFF (Character = ON or OFF) |
ITW |
If the solution of a time step converges within ITW iterations the next time step will be increased by a factor controlled by DTSCI. Default = 6 for TSCTRL = ARC Default = 2 for TSCTRL = SIMP Default = 12 for TSCTRL = RIKS Default = 6 (Integer > 0) |
DTSCI |
Maximum scale factor for increasing the time step (TSCTRL = ARC or RIKS). Scale factor for TSCTRL = SIMP. Default = 1.1 (Real > 0) |
LDTN |
Maximum number of iterations before resetting and decreasing the time step by a factor of DTSCD. Default = 20 for TSCTRL = ARC Default = 15 for TSCTRL = SIMP Default = 25 for TSCTRL = RIKS (Integer > 0) |
DTSCD |
Scale factor for decreasing the time step (TSCTRL = ARC, SIMP, or RIKS). Default = 0.67 (Real > 0) |
LARC |
Input arc-length for TSCTRL = ARC or RIKS Default = automatic computation (Real) |
CTYP |
Constraint type: See comment 6. CRIS – Crisfield constraint equation. MFSRIKS - Modified Forde & Stiemer equation. Default = CRIS (CRIS or MFSRIKS) |
WSCAL |
Scale factor for controlling the loading contribution in the constraint equation. Default = 0.0 (Real > 0.0) |
| 1. | The NLPARMX bulk data entry is selected by the Subcase Information command NLPARM = option. There must also be an NLPARM bulk data entry with the same ID. It is only used in geometric nonlinear implicit static analysis (ANALYSIS = NLGEOM); it is ignored in other analyses. |
| 2. | The solution method for geometric nonlinear implicit analysis is selected by SOLV. The frequency of stiffness matrix updates is controlled by KSTEP. For highly nonlinear problems, it is recommended to reduce KSTEP for better performance. KSTEP = 1 means full Newton. |
| 3. | If the loading is defined using NLOAD, the termination time TTERM must be defined by a TTERM subcase entry. The initial implicit time step is DTINI = TTERMS/NINC with TTERMS = TTERM – T0. All subsequent time steps will be determined automatically. In a simulation with multiple nonlinear subcases, T0 is the end time of the previous load step. If there is only a single nonlinear subcase, T0 = 0.0. |
If the loading is defined using LOAD, TTERM is not mandatory. These loads are treated as linear ramp-up. If TTERM is defined, the load ramps up from the end time of the previous subcase to TTERM. If TTERM is absent, it will be determined from the subcase sequence such that the duration of each subcase TTERMS = 1.0. In this case, the initial time step is DTINI = 1.0/NINC.
| 4. | For models that are not sufficiently constrained, inertia stiffness can be used to overcome a singular stiffness matrix. The inertia stiffness [K]inertia = 1/(DTSCQ*dt)^2[M] is added to the stiffness matrix [K]. Care needs to be taken in the selection of DTSCQ. Too large of an added mass may lead to wrong results. |
| 5. | Linear static and normal modes analysis within geometric nonlinear analysis (ILIN = LIN or LINC) are provided for debugging purposes. They may help detecting modeling errors. All materials are linearized, and linear displacements are assumed as well. The load is taken at the termination time. To run normal modes analysis, a METHOD subcase entry that refers to an EIGL bulk data entry must be provided. |
| 6. | The constraint equation for CTYP = CRIS is: |
![]()
Where, u is displacement, ![]() is the scale factor (WSCAL) ,
is the scale factor (WSCAL) , ![]() is load factor, and
is load factor, and ![]() is the arc-length.
is the arc-length.
The constraint equation for CTYP = MFSRIKS is:
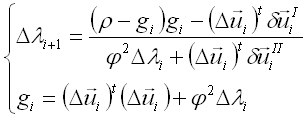
Where, ![]() is the displacement, due to a unit load factor, and
is the displacement, due to a unit load factor, and ![]() is the displacement increment from the conventional Newton type method. The meaning of u,
is the displacement increment from the conventional Newton type method. The meaning of u, ![]() ,
, ![]() , and
, and ![]() are the same as those above.
are the same as those above.
| 7. | For Nastran compatibility, NLPCI is imported if present. Only the fields ID, TYPE are interpreted. With NLPCI present, the default for TSCTRL will be reset to RIKS. TYPE will be translated into CTYP; all other entries are set to default. A warning will be issued. NLPCI and NLPARMX cannot be used simultaneously. It is recommended to remove NLPCI and use NLPARMX with the appropriate definitions |
| 8. | This card is represented as an extension to an NLPARMX loadcollector in HyperMesh. |
See Also: