|
»Click here to display Table of Contents«
|

Rigid Wall (/RWALL) |

|

|

|

|
|
Rigid Wall (/RWALL) |
|
|
|

|
|
»Click here to display Table of Contents«
|
Rigid Wall (/RWALL) |
|
|
|
|
|
Rigid Wall (/RWALL) |
|
|
|
|
A rigid wall is a nodal constraint applied to a set of slave nodes in order to avoid the node penetration to the wall. If contact is detected, then the slave node acceleration and velocity are modified.
There is no gap to determine whether or not a slave node is in contact. Contact occurs only when the slave node impacts the rigid wall surface. The slave node's tangential velocity can also be modified depending on the flag Slide. The default value (=0) enables the model pure sliding during contact. If set to 1, no sliding is allowed, the slave nodes are “tied” in the tangential direction. If set to 2, friction based on Coulomb model is enabled.
Four types of rigid walls are available in RADIOSS:
The rigid walls can be fixed or moving. A fixed wall is a pure kinematic condition on all impacted nodes; whereas a moving wall is similar to a master slave option. A master node defines the wall position at each time step and imposes velocity on impacted slave nodes. Impacted slave node forces are applied to master node. The slave node forces are computed with momentum conservation. The mass of a slave node is not transmitted to a master node, assuming a large rigid wall mass compared to impacted slave nodes mass.
An infinite rigid wall is a planar surface which extends to infinity. It is defined by two points representing the rigid wall normal (Fig. 4.5).
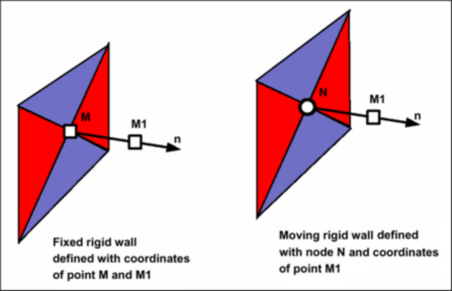
Fig. 4.5: Infinite rigid wall
An infinite cylindrical wall is a cylinder which extends to infinity. It is defined with two points (or one point and one node) and a diameter. Note that contact is only possible from outside the cylindrical wall.
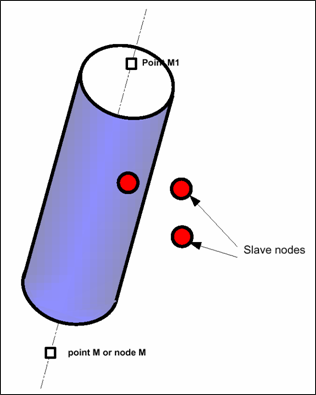
Fig. 4.6: Infinite cylindrical wall
A spherical wall is a sphere defined by a point M (or a node N) and a diameter.
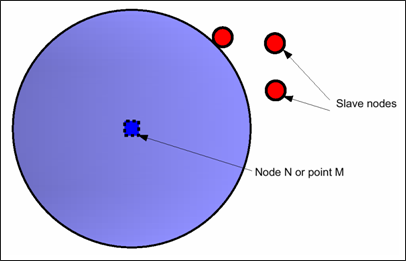
Fig. 4.7: Spherical wall
A finite planar wall is a parallelogram defined by three points M, M1 and M2. In case of a moving wall, M will be considered as the master node.
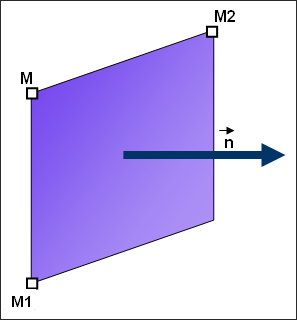
Fig. 4.8: Finite planar rigid wall
| 1. | During the simulation of a moving wall is following the master node N but the wall orientation remains constant and parallel to initial normal. A moving rigid wall does not respect the moment equilibrium, only force equilibrium is applied. An external moment is therefore applied from laboratory to the wall. |
| 2. | If the slave nodes are defined with a distance from the wall only, the nodes with positive or zero distance are considered (that is the nodes behind the infinite wall or in the cylinder wall are not considered as slave). |
| 3. | A node initially impacted into a wall cannot rebound; except if the rebound velocity is high enough to go out from the wall in only one cycle. |
| 4. | If a random noise is added to the node coordinates, the initial position of slave nodes are modified and for a moving wall, the wall location is changed. Therefore, it is possible that some slave nodes with zero or near zero distance from the wall move inside the wall. If slave nodes are defined with a distance, these nodes are not slave nodes. If these nodes are explicit slave nodes, they will stay inside the wall without possible rebound. |
| 5. | With random noise (/RANDOM) the orientation of a moving wall is also affected. Location of master node N is moved with random value and the normal defined with node N and point M1 is changed. This is especially critical if point M1 is close to point N. |
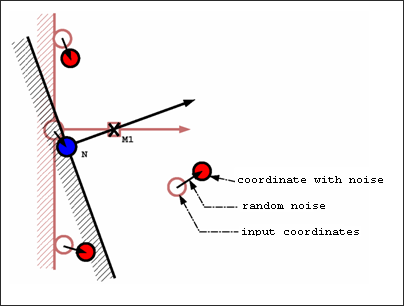
Fig. 4.9: Change in wall orientation, due to random noise