|
»Click here to display Table of Contents«
|

Atpoint Joint |

|

|

|

|
|
Atpoint Joint |
|
|

|

|
|
»Click here to display Table of Contents«
|
Atpoint Joint |
|
|
|
|
|
Atpoint Joint |
|
|
|
|
This section describes the Atpoint joint entity of MotionView and shows the various usage, creation, and editing methods.
An Atpoint joint is a three degree-of-freedom kinematic pair used in mechanisms. This joint is identical to the Ball joint. Atpoint joints provide three-axis rotation function.
Atpoint joint construction
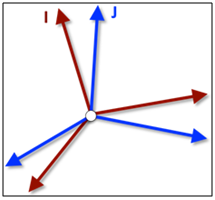
The Atpoint joint is represented using co-incident markers when exported to MBD Solver. The representation can be visualized as shown in the figure below:
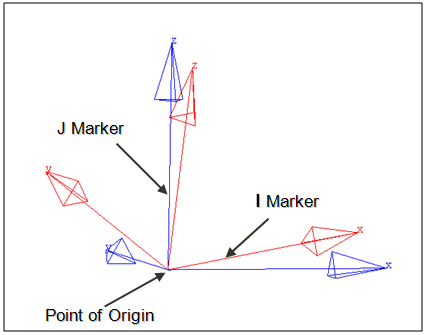
Atpoint joint marker representation
The bodies that are constrained by the Atpoint joint are represented using two markers: Marker I and Marker J. Marker I belongs to Body 1 and Marker J belongs to Body 2. The constraints are applied on the Marker I with respect to the Marker J. Both of the markers will have a common point of origin, the same as the Joint’s Origin point. The I Marker is free to rotate about the X, Y and Z axis of the J Marker.
The topological information required to define an Atpoint joint is shown in the figure below:
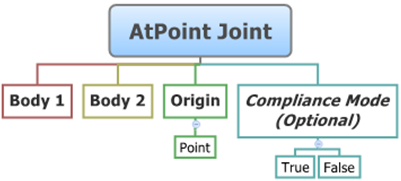
The data members of the Atpoint joint can be classified into the following members:
An Atpoint joint needs the following:
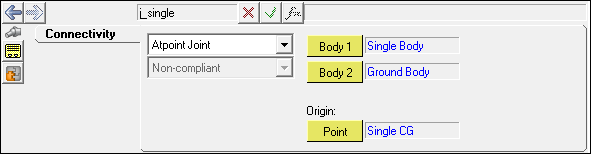
| • | Body 1 and Body 2 - Specify two Bodies between which the joint is to be created. |
| • | Origin - Specify a Point, which defines the location of the joint. |
| • | Compliant Mode (Optional) - If the Allow Compliance option is selected while adding the joint to the model, the joint’s compliance state can be toggled between Compliant and Non-Compliant. |
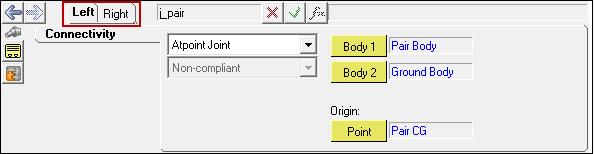
The joint can be modeled as a Single entity or as a Pair entity.
There are no editable properties for an Atpoint joint.
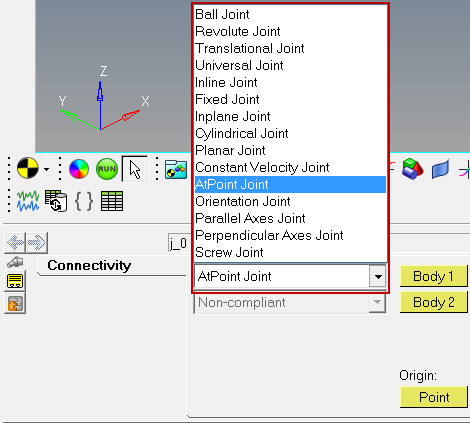
To learn how to add an Atpoint joint to a model, please see the Joints topic.
Joints Panel (Atpoint Joint) – Connectivity Tab – Single Entity
Joints Panel (AtPoint Joint) – Connectivity Tab – Pair Entity
|
The Project Browser will filter the entities and display only the joints in the model.
The corresponding panel is automatically displayed.
|
The model containing the Atpoint joint can be saved in MDL format from MotionView and exported in the MotionSolve XML format.
The Atpoint joint can be of the following types:
These four types of entities can be added to the model using the MDL Statements shown below:
To learn how to create a complete model using MDL Statements please refer to tutorial MV-1060: Introduction to MDL. |
The Atpoint joint when exported to the MotionSolve XML format is defined as a Constraint_Joint or Constraint_Jprim statement. Syntax: <Constraint_Joint [Constraint_Jprim] id = "integer" label = "Name of Joint" type = "JOINT TYPE" i_marker_id = "integer" j_marker_id = "integer" /> Example: <Constraint_Joint [Constraint_Jprim] id= "301001" label = "AtPoint Joint" type = "ATPOINT" i_marker_id = "30103050" j_marker_id = "30101050" /> In the above XML Model statement the i_marker_id and j_marker_id represent the I and J markers of the Joint which belong to Body 1 and Body 2 respectively. To understand the complete syntax of the Constraint_Joint XML model statement, please refer to the MotionSolve Reference Guide Page for Constraint_Joint or Constraint_Jprim. |
The MotionView Tcl command layer can be used to add any MDL entities to the model. There are two Tcl commands that can be used to add an entity:
Syntax: mdlmodel_handle InterpretEntity new_handle keyword varname label Example: mdlmodel_handle InterpretEntity joint_AtPoint_handle AtPointJoint j_AtPoint "\"AtPoint Joint\"" b_1 B_Ground p_0 "ALLOW_COMPLIANCE"; |
*This command is not applicable for Atpoint joint entities. |
The InterpretEntity command is used to add entities to the model and the InterpretSet command is used to set the entity properties. Extended definitions for InterpretEntity and InterpretSet can be found in the HyperWorks Desktop Reference Guide.
Note - When using the InterpretEntity and InterpretSet commands, it is important to also use the Evaluate command in order for the changes to take effect immediately.
To learn how to create a complete model using Tcl commands, please refer to tutorial MV-1040: Model Building Using Tcl.
The example file below shows an Atpoint joint connecting two bodies:
*BeginMDL( the_model, "Model" ) *StandardInclude(FILE) *Point( p_0, "Point 0" ) *PointPair( p_1, "Point 1" ) *SetPoint( p_1, LEFT, , -100 ) *Body( b_0, "Body 0", p_0, , , , ) *BodyPair( b_1, "Body 1", p_1, , , , ) *Set( b_0.usecm, true ) *Set( b_1.usecm, true ) //Example - Single AtPoint Joint *AtPointJoint( j_apjsingle, "AtPoint Joint Single", b_0, B_Ground, p_0 ) //Example - AtPoint Joint Pair *AtPointJointPair( j_apjpair, "AtPoint Joint pair", b_1, B_Ground, p_1 ) *EndMDL() |
See Also:
*AtPointJoint() (MDL Model Statement)
*AtPointJointPair() (MDL Model Statement)
Constraint_Joint (XML Command)
Constraint_Jprim (XML Command)
InterpretEntity (Tcl Command)
InterpretSet (Tcl Command)