The Properties tab on the Spring Dampers panel allows you to define the translational or rotational stiffness and damping properties of coil or torsion springs respectively.
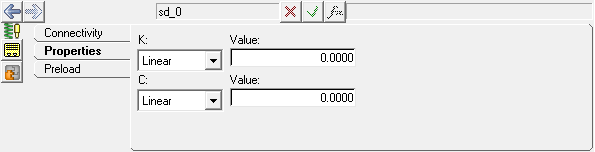
Spring Dampers panel - Properties tab
The spring force can be represented through a linear stiffness, a curve based function, a 3D spline, or an expression based function.
For Coil Springs:
|
Enter:
|
K Linear
|
linear stiffness coefficient of the coil spring. The value entered must be real and positive.
|
K Curve
|
spring force transmitted through the spring-damper, expressed in the form of a curve which is a function of an independent variable.
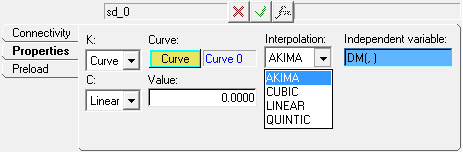
Select AKIMA, CUBIC, LINEAR, or QUINTIC under Interpolation and resolve the curve by clicking on the Curve collector and selecting a 2-D Cartesian curve from the Select a Curve dialog.
Specify an expression under Independent variable. By default, the independent variable is filled with the expression {sd.DM}, where sd is the variable name of the Spring Damper.
|
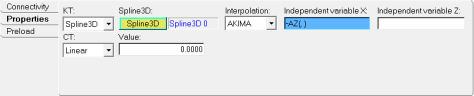
K Spline3D
|
spring force transmitted through the spring-damper, expressed in the form of a 3D spline which is a function of two independent variables.
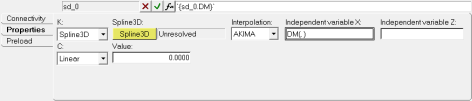
Select AKIMA, CUBIC, LINEAR, or QUINTIC under Interpolation and resolve the 3D spline by clicking on the Spline3D collector and selecting a Spline3D entity from the Select a Spline3D dialog.
Specify an expression each under Independent variable X and Independent variable Z. By default, the Independent variable X is filled with the expression {sd.DM}, where sd is the variable name of the Spring Damper.
|
K Expression
|
spring force transmitted through the spring-damper, expressed in the form of a solver function.
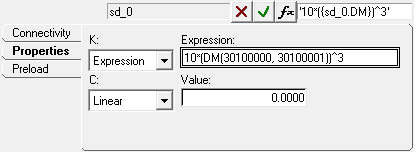
The above panel image shows an example expression where the spring force is a cubic polynomial function depending on distance between the two ends of the spring.
|
Similarly, the damping force can be represented through a linear damping coefficient, a curve based function, or an expression based function.
C Linear
|
liner damping coefficient of the coil spring. The value entered must be real and positive.
|
C Curve
|
damping force, expressed in the form of a curve which is a function of an independent variable.
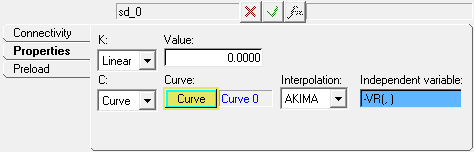
Select AKIMA, CUBIC, LINEAR, or QUINTIC under Interpolation and resolve the curve by clicking on the Curve collector and selecting a 2-D Cartesian curve from the Select a Curve dialog.
Specify an expression under Independent variable. By default, the independent variable is filled with the expression {sd.VR}, where sd is the variable name of the Spring Damper.
|
C Spline3D
|
damping force transmitted through the spring-damper, expressed in the form of a 3D spline which is a function of two independent variables.
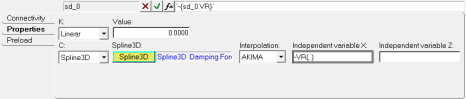
Select AKIMA, CUBIC, LINEAR, or QUINTIC under Interpolation and resolve the 3D spline by clicking on the Spline3D collector and selecting a Spline3D entity from the Select a Spline3D dialog.
Specify an expression each under Independent variable X and Independent variable Z. By default, the Independent variable X is filled with the expression {sd.VR}, where sd is the variable name of the Spring Damper.
|
C Expression
|
damping force transmitted through the coil spring, expressed in the form of a solver function.
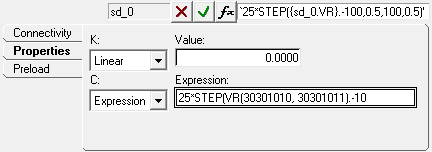
In the example shown above, a STEP function is used to vary the damping force with respect to the relative velocity.
|
For Torsion
Springs:
|
Enter:
|
KT Linear
|
linear rotational stiffness coefficient of a linear torsion spring. The value entered must be real and positive.
|
KT Curve
|
spring torque transmitted through the torsion spring, expressed in the form of a curve which is a function of an independent variable.
Select AKIMA, CUBIC, LINEAR, or QUINTIC under Interpolation and resolve the curve by clicking on the Curve collector and selecting a 2-D Cartesian curve from the Select a Curve dialog.
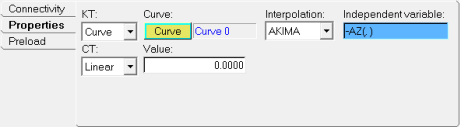
Specify an expression under Independent variable. By default, the independent variable is filled with the expression {sd.AZ}, where sd is the variable name of the Spring Damper.
|
KT Spline3D
|
spring force transmitted through the spring-damper, expressed in the form of a 3D spline which is a function of two independent variables.
Select AKIMA, CUBIC, LINEAR, or QUINTIC under Interpolation and resolve the 3D spline by clicking on the Spline3D collector and selecting a Spline3D entity from the Select a Spline3D dialog.
Specify an expression each under Independent variable X and Independent variable Z. By default, the Independent variable X is filled with the expression {sd.AZ}, where sd is the variable name of the Spring Damper.
|
KT Expression
|
spring torque transmitted through the spring, expressed in the form of a solver function.
|
|
|
CT Linear
|
linear damping coefficient of the torsion spring. The value entered must be real and positive.
|
CT Curve
|
damping torque, expressed in the form of a curve which is a function of an independent variable.
Select AKIMA, CUBIC, LINEAR, or QUINTIC under Interpolation and resolve the curve by clicking on the Curve collector and selecting a 2-D Cartesian curve from the Select a Curve dialog.
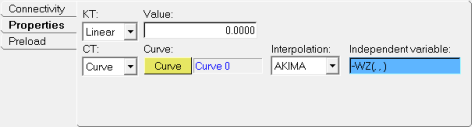
Specify an expression under Independent variable. By default, the independent variable is filled with the expression {sd.WZ}, where sd is the variable name of the Spring Damper.
|
CT Spline3D
|
damping force transmitted through the spring-damper, expressed in the form of a 3D spline which is a function of two independent variables.

Select AKIMA, CUBIC, LINEAR, or QUINTIC under Interpolation and resolve the 3D spline by clicking on the Spline3D collector and selecting a Spline3D entity from the Select a Spline3D dialog.
Specify an expression each under Independent variable X and Independent variable Z. By default, the Independent variable X is filled with the expression {sd.WZ}, where sd is the variable name of the Spring Damper.
|
CT Expression
|
damping force transmitted through the torsion spring, expressed in the form of a solver function.
|
Notes:
| 1. | For spring dampers with Linear properties, a Force_SpringDamper statement is written in MotionSolve xml. |
| 2. | Use the Curve or Expression type to define a non-linear spring or damper. |
| 3. | If a Curve or Expression type is specified for either the spring or damper property, a Force_Scalar_TwoBody statement is written to the MotionSolve xml. Any Preload specified using the PreLoad tab is not considered. |
| 4. | {sd.DM} (where sd is the variable name of the spring damper) traces the distance magnitude of the two spring end points. The expression is evaluated as DM(i,j), where i is the spring damper marker on Body 1 at Point 1 and j is the spring damper marker on Body 2 at Point 2. |
| 5. | {sd.VR} traces the relative radial velocity between the two end points. The expression is evaluated as VR(i,j). |
| 6. | {sd.AZ} traces the relative rotation between the two end points of the spring. The expression is evaluated as AZ(i,j). |
| 7. | {sd.WZ} traces the relative rotational velocity between two end points of the spring. The expression is evaluated as WZ(i,j). |
How do I...
Create a 2D Cartesian Curve
Define non-linear properties
Define non-linear properties using expressions
Defining Non-linear Properties Using Curves





