|
»Click here to display Table of Contents«
|

/INTER/TYPE19 |

|

|

|

|
|
/INTER/TYPE19 |
|
|

|

|
|
»Click here to display Table of Contents«
|
/INTER/TYPE19 |
|
|
|
|
|
/INTER/TYPE19 |
|
|
|
|
Block Format Keyword
/INTER/TYPE19 - Interface Type 19
Description
This is a combination of interface TYPE7 and TYPE11, with common input based on the same slave/master surfaces. Slave node group for interface TYPE7, as well as slave and master line segments used by equivalent TYPE11 interface are virtually generated from these input surfaces.
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
/INTER/TYPE19/inter_ID/unit_ID |
|||||||||
inter_title |
|||||||||
surf_IDs |
surf_IDm |
Istf |
|
Igap |
|
Ibag |
Idel |
Icurv |
|
Fscalegap |
Gap_max |
|
|
|
|
|
|
||
Stmin |
Stmax |
|
|
dtmin |
|
|
|||
Insert if Icurv = 1 or 2
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
node_ID1 |
node_ID2 |
|
|
|
|
|
|
|
|
Required Fields
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
Stfac |
Fric |
Gapmin |
Tstart |
Tstop |
|||||
IBC |
|
|
Inacti |
VISS |
VISF |
Bumult |
|||
Ifric |
Ifiltr |
Xfreq |
Iform |
sens_ID |
|
|
|
|
|
Insert if Ifric > 0 (Optional)
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
C1 |
C2 |
C3 |
C4 |
C5 |
|||||
Read this input only if Ifric > 1 (Optional)
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
C6 |
|
|
|
|
|
|
|
|
|
|
|
while,
gm = 0 for brick elements
gs = 0 if the slave node is not connected to any element or is only connected to brick or spring elements.
Igap = 2 is not available in interface TYPE11. For node to 3-node and 4-node segments or 2-node segments to 2-node segments contacts computation as follows:
Where,
Istf = 2, Istf = 3, Istf = 4, Istf = 5,
When master segment lies on a shell or is shared by shell and solid:
When master segment lies on a solid:
Where, S is the segment area, V is the volume of the solid, B is the Bulk Modulus
when node is connected to a shell element:
when node is connected to solid element:
There is no limitation value to the stiffness factor Stfac (but a value can be larger than 1.0 to reduce the initial time step)
While,
t: average thickness of the master elements for shell elements. l: average side length of the master brick elements. lmin: the smallest side length of all master segments (shell or brick).
with:
If the slave node is connected to multiple shells and/or beams or trusses, the largest computed slave gap is used. The variable gap is always at least equal to Gapmin. Inacti = 5 is recommended for airbag simulation deployment. Inacti = 6 is recommended instead of Inacti =5, in order to avoid high frequency effects into the interface.
While,
Where, p is the pressure of the normal force on the master segment, V is the tangential velocity of the slave node.
Where,
If Ifiltr ≠ 0, the tangential forces are smoothed using a filter:
where
The filtering coefficient Xfreq should have a value between 0 and 1.
While an adhesion force is computed as follows:
While an adhesion force is computed as follows:
Where, Vt is contact tangential velocity |
Interface TYPE7 in User’s Guide
Interface TYPE11 in User’s Guide
Penalty Method in User's Guide

 , with
, with  for truss and beam elements, with
for truss and beam elements, with 
 , with
, with  , with
, with  , with S being the cross section of the truss and beam element.
, with S being the cross section of the truss and beam element.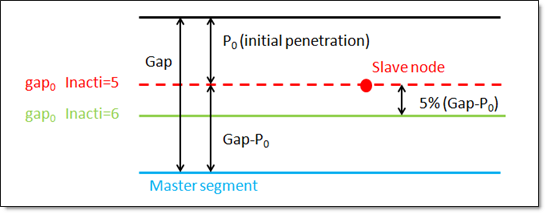
 if
if  if
if  if
if 
