|
»Click here to display Table of Contents«
|

/INTER/TYPE11 |

|

|

|

|
|
/INTER/TYPE11 |
|
|

|

|
|
»Click here to display Table of Contents«
|
/INTER/TYPE11 |
|
|
|
|
|
/INTER/TYPE11 |
|
|
|
|
/INTER/TYPE11 - Interface Type 11 - Edge to Edge or Line to Line Interface
This interface simulates impact between Edge to Edge or lines. A line can be a beam or truss element or a shell edge or spring elements. The interface properties are:
| • | Impacts occur between a master and a slave line. |
| • | A slave line can impact on one or more master lines. |
| • | A line can belong to the master and the slave side. This allows self-impact. |
| • | This interface can be used in addition to interface TYPE7 to solve the edge to edge limitation of interface TYPE7. |
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
/INTER/TYPE11/inter_ID/unit_ID |
|||||||||
inter_title |
|||||||||
line_IDs |
line_IDm |
Istf |
Ithe |
Igap |
|
|
Idel |
|
|
Stmin |
Stmax |
%mesh_size |
dtmin |
Iform |
sens_ID |
||||
Stfac |
Fric |
Gapmin |
Tstart |
Tstop |
|||||
IBC |
|
|
Inacti |
VISS |
VISF |
Bumult |
|||
(Optional) Read this input, if Ithe > 0
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
Kthe |
fct_IDK |
AscaleK |
Tint |
Ithe_form |
|
|
|||
Frad |
Drad |
|
|
|
|||||
|
|
While,
t: average thickness of the master elements for shell elements. l: length of the smallest side of solid elements. S: smallest cross section of the beam and truss elements.
While, gm: master element gap.
gs: is computed the same way; except that it is applied on slave side elements. gm_l : length of the smaller edge of element. gs_l : length of the smaller edge of elements connected to the slave node. The variable gap is always at least equal to Gapmin.
While, Kn is computed from both master segment stiffness Km and slave segment stiffness Ks as follows if Istf ≠ 1: Istf = 2, Istf = 3, Istf = 4, Istf = 5,
when master segment lies on a shell or is shared by shell and solid:
when master segment lies on a solid:
Where, S is the segment area, V is the volume of the solid, B is the Bulk Modulus
when node is connected to a shell element:
when node is connected to solid element:
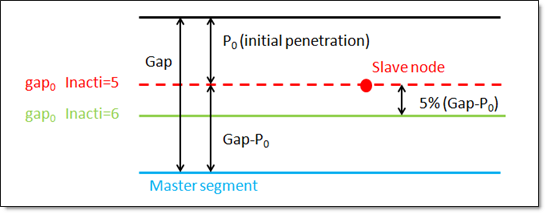
Inacti = 5 is recommended for airbag simulation deployment. Inacti = 6 is recommended instead of Inacti = 5, in order to avoid high frequency effects into the interface.
Friction penalty formulation Iform
While an adhesion force is computed as follows:
While an adhesion force is computed as follows:
Where, Vt is contact tangential velocity Iform = 2 is recommended for implicit and low speed impact explicit analysis.
By Ithe=1 (heat transfer activated) to consider heat exchange and heat friction in contact.
Tint is used only when Ithe_form=0. In this case. The temperature of master side assumed to be constant (equal to Tint). If Ithe_form=1 then Tint is not take into account. So the nodal temperature of master side will be considered. If Ithe >1 needs the material of the slave side to be a thermal material using finite element formulation for heat transfer (see /HEAT/MAT). Heat exchange coefficient
While fK is function of fct_IDK.
Radiation is considered in contact if
While Drad is the Maximum distance for radiation computation. The default value for Drad is computed as the maximum of:
It is recommended not to set the value too high for Drad, which may reduce the performance of RADIOSS Engine. The heat exchange is computed only from master to slave. A radiant heat transfer conductance is computed as:
with
Where, |
Interface TYPE11 in User's Guide


 with
with  with
with  with
with 
 is the Stefan Boltzman constant,
is the Stefan Boltzman constant,