Block Format Keyword
/SPRING - Spring Elements
Description
Describes the spring elements. It used for modeling connection. The spring properties are apply on the local spring coordinate system.
Format
(1)
|
(2)
|
(3)
|
(4)
|
(5)
|
(6)
|
(7)
|
(8)
|
(9)
|
(10)
|
/SPRING/part_ID
|
sprg_ID
|
node_ID1
|
node_ID2
|
node_ID3
|
node_ID4
|
node_ID5
|
node_ID6
|
|
|
|
Field
|
Contents
|
part_ID
|
Part identifier of the block
(Integer, maximum 10 digits)
|
sprg_ID
|
Element identifier
(Integer)
|
node_ID1
|
Node identifier 1 for spring
(Integer)
|
node_ID2
|
Node identifier 2 for spring
(Integer)
|
node_ID3
|
Node identifier 3 (optional)
(Integer)
|
node_ID4
|
Node identifier 4 (optional)
(Integer)
|
node_ID5
|
Node identifier 5 (optional)
(Integer)
|
node_ID6
|
Node identifier 6 (optional)
(Integer)
|
|
| 1. | The identifier must be unique in each element family, but it is advised for each element type to have a unique element identifier in the global model. |
| 2. | More than one spring block can be used to define a part. |
| 3. | Any number of springs can be defined in one block. |
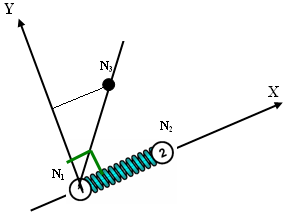
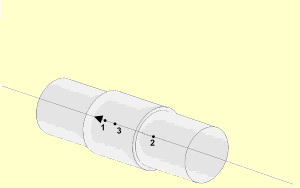
| 6. | Spring element is defined with two nodes: node_ID1 and node_ID2 (see image below). |
The plane XY is defined with the three nodes (node_ID1, node_ID2, and node_ID3); the third node, node_ID3 defines the Y direction also for the non-symmetric spring (/PROP/TYPE13).
| 7. | The /SPRING card is also used to define /PROP/KJOINT2 joints. For each joint type, node_ID1 and node_ID2 are used to define the joint itself. node_ID1 must be attached to one rigid body and node_ID2 to another rigid body. These nodes can be non-coincident, but for better behavior of the joints, it is strongly advised to use initially coincident nodes. Optional nodes node_ID3, node_ID4 are used for definition of local coordinate systems on two sides of joint. Initially the coordinate systems are coincident. Behavior of the joint is determined by relative motion/rotation of these local coordinate systems. |
| 8. | For spherical and rigid joints only node_ID1 and node_ID2 are required. Local coordinate system of the joint is initially defined with node_ID1, node_ID3 and node_ID4 or with the global coordinate system (if node_ID3 and node_ID4 are node defined). |
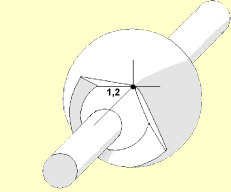
Spherical joint
| 9. | For revolute, cylindrical, translational and planar joints, node_ID3 is used to define the first axis of the joint coordinate system. If node_ID3 is not specified, the axis of the joints is defined using the line between node_ID1 and node_ID2. In this case, the nodes should not be coincident. |
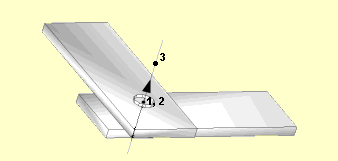 
| Revolute joint | Translational joint |
 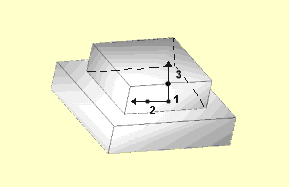
| Cylindrical joint | Planar joint |
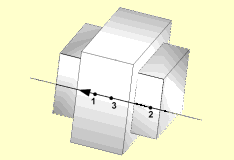
| 10. | For universal and free joints, node_ID3 and node_ID4 are used to define the first and the second axis of the joint coordinate system. |
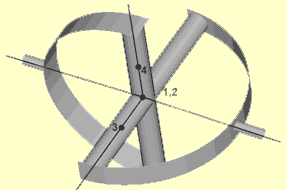
Universal joint
| 11. | When joint properties are non-isotropic (not the same stiffness, friction or damping for each non-blocked DOF), a full definition of local coordinate systems is required. In this case the first axis of the local coordinate system is defined by node_ID3, the second axis of the local coordinate system is defined by node_ID4, and the third axis is computed automatically. |
| 12. | Both node_ID5 and node_ID6 are reserved for future use for new joints types |
|
See Also:
Springs in User's Guide
Spring Element in Theory Manual
Example 5 - Beam Frame
Example 12 - Jumping Bicycle
Example 14 -Truck with Flexible Body
Example 16 - Dummy Positioning
Example 21 - Cam






